电压补偿条件下永磁系统直流侧振荡抑制研究
日期: 2022/5/23 浏览: 2 来源: 学海网收集整理 作者: 张静 李动
衡水技师学院(衡水科技工程学校)
摘要:为了深入探究特殊工况下永磁牵引系统的阻抗特性,改善系统作业稳定性,本文对永磁系统直流侧振荡问题展开探究。本研究方案以电压补偿作为振荡抑制的优化突破口,根据永磁同步电压作业原理,对其采取前馈解耦电压补偿,形成新的振荡抑制方案。实验测试结果显示,本文提出的振荡抑制方案,能够使得电机作业电流趋于平稳,且直流侧未出现振荡,
较传统振荡抑制方案应用效果有明显地改善。
关键词:永磁同步电机;电压补偿;振荡抑制
高性能永磁材料的出现,打破了传统城市轨道交通控制模式,为高效节能发展创造了有利条件[1]。虽然这种材料具备优势较多,但是应用时间比较短,尚未形成较为完善的控制方案。特定工况下,交通轨道牵引变流器阻抗特性结果为负值,埋下了LC谐振安全隐患,同时对永磁同步电机的正常作业造成了较大影响[2]。为了改善永磁牵引系统作业状态,在成本控制条件下,挖掘母线电压振荡抑制方法,成为了当前重点研究内容。本文尝试引入电压补偿控制思路,探究能够有效抑制系统直流侧振荡的方法。
一、永磁牵引系统模型的构建及作业机理分析
1、永磁牵引系统模型的构建
一般情况下,与交流供电形式相比,直流供电形式在城市轨道交通牵引系统作业中的供电更具优势,不仅效率偏高,而且满足节能控制要求[3]。永磁同步电机作为系统作业控制的重要组成部分,通过直流作业刚好可以体现出这些优势[4]。所以,直流供电成为了永磁同步电机的主要供电方式。如图1所示为永磁牵引系统模型。
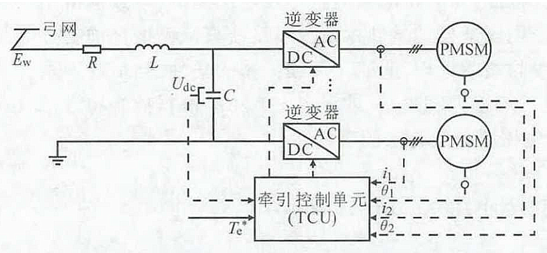
图1 永磁牵引系统模型
图1中,C代表支撑电容;R代表电感电阻与各条线路电阻之和; 代表网侧电压;L代表滤波电感; 均为电机作业电流; 代表逆变器侧输入直流母线电压; 代表电机转矩指令, 均为电机转子位置。
该模型结构简单,采用独立轴控的方式,在逆变器的控制下,向永磁电机发送控制命令。其中,逆变器数量较多,共同使用同一个母线。另外,该系统的核心控制器为TCU,当列车成功接收电机发送的转矩指令时,会自动开启信息采集模块,同时获取转子位置、电机电流及母线当前作业环境下生成的电压值等,根据这些参数数值大小,确定永磁牵引系统作业命令,从而为系统正常作业奠定基础[5]。
2、系统模型作业机理
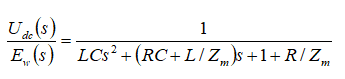
永磁牵引系统作业期间产生的振荡机理是设计电机直流侧振荡抑制方案的主要依据,所以本文对模型作业机理进行分析。假设系统输入端输入的信号为 ,位于C两端的直流电压输出记为 ,那么生成的系统传递函数为:
在公式(1)基础上,挖掘二阶系统谐振频率,计算公式如下:

考虑到车辆本身的惯性偏大,短时间内可以将车辆内部结构中的电机转速数据看作固定值,在此条件下,永磁同步电机控制系统和逆变器这些装置作业期间的功率源都可以看作恒定值。牵引工况下,电机运行期间的功率为正数,电流伴随着反向扰动。在此过程中,系统阻抗为负,逆变器阻抗特性与之相同,该条件下逆变器加电压作业期间产生的等效阻抗计算公式为:
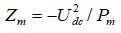
公式(3)中, 代表逆变器直流侧输入功率。根据公式(3),可以对公式(1)的计算公式进行改进,得到:

系统作业稳定性对于永磁牵引控制质量影响较大,为了掌握该系统作业稳定性,提出以下判断方法:
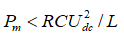
公式(5)中, 为系统作业功率临界值,如果逆变器输入功率达到这个临界值,那么认为当前系统作业稳定性较差。依据公式(5)可知,系统作业条件、硬件参数设置均会对系统直流侧的稳定性造成一定影响。对于系统硬件参数,以R、C、L作为系统作业状态控制变量,其中,参数C和参数R与系统稳定性之间存在正相关关系,参数L与系统稳定性之间呈现的关系为负相关关系。一般情况下,系统中参数R在100m 以内,如果采用人为干扰的方式增加R数值,此时系统的损耗就会出现大幅度提升。另外,L减少条件下,直流母线纹波将有所增加,C变大条件下,系统的变流器重量和系统开发成本都会有所增加。惰行工况或者系统制动工况,均可以为系统稳定运行创造良好条件,牵引工况下,系统可能会因功率值的变大而产生振荡。
二、永磁同步电机直流侧振荡抑制
1、永磁同步电机作业数学模型
该装置在坐标系为d,p中作业产生的电压,可以用以下方程计算获得:
(6)
公式(6)中,d,p代表坐标系轴,对应的轴定子电压分别为 ; 代表转子电角速度; 代表定子电阻;p代表微分算子; 代表永磁体磁链; 均代表电机电感,分别对应d轴、q轴。
电机作业期间产生的电磁转矩,可以用以下公式计算:
(7)
公式(7)中, 代表电机极对数。
2、永磁同步电机矢量控制方法
一般情况下,对于城市车辆牵引力的分配,利用手柄向电机发送操控命令。电机的转子位置 可以运用变压器测量,对该项参数采取微分处理后,生成电角速度 。利用万用表测量电机线路中的电流,得到参数 数值,对这两个参数进行变换,从而获取d轴和q轴对应的电流,记为 。其中,采用的变换方法有两种,分别为Park、Clarke。关于各条线路中的电流控制,通过调节最大转矩电流比,合理为各条线路分配电流。为了有效控制电机矢量,本方案为电机控制增加了前馈解耦电压补偿控制模块,选取输入电压作为补偿控制工具,向脉宽调制模块发送电压控制信号,以此控制逆变器作业状态,最终起到一定矢量控制作用。
由于线路中变流器的连接,会增加系统作业环境温度,不利于系统正常作业,所以对系统中的IGBT(Insulated Gate Bipolar Transistor,绝缘栅双极型晶体管)开关频率进行了限定,最高频率设定为900Hz。在此条件下,电机调制算法应该融入多种调制方法,不可以依靠一种方法,本研究选择分段控制方式,设计调制策略。按照速度不同进行分段,得到低速区段、中速区段、高速区段。其中,低速区段,设定的调制方式为异步调制;中速区段,设定的调制方式为同步调制,脉冲数包括3、7、12、15;高速区段,设定的调制方式为方波调制,该环境下电机作业产生的谐波比较小,并且电压利用率较高。
3、前馈解耦电压补偿处理
本文构建的永磁同步电机作业过程中产生耦合效应,比值减小幅度的增加,会导致耦合效应更加严重。另外,电机转速增加,且给定转矩不变的情况下,电机功率产生持续增加的变化趋势。在此期间,直流侧LC谐振的产生,会导致系统作业稳定性下降,母线中的电流和电压都会因此产生振荡。为了改善这个问题,本设计方案以 作为处理对象,以滤波作为改善工具,补偿前馈解耦电压。其中,滤波处理产生扰动量,将此部分扰动量放大 倍,前馈解耦电压中,从而使得抑制电流侧振荡得以有效补偿。
三、实验测试分析
1、实验平台的搭建
本研究选择城市轨道牵引平台作为实验平台,按照城规牵引结构搭建实验台结构,该结构主要由直流电源、惯量负载、牵引变流器、永磁同步电机4部分组成。其中,线路中的供电电压为750V,为牵引变流器提供作业电源,该装置与IGBT组成逆变器。平台中,直流侧电容C数值为4.7mF,直流侧的电感为0.5mH。永磁同步电机作业核心参数如下:(1)额定效率数值为96.4%;(2)额定转速数值为1800 ;(3)额定功率数值为180kW;(4)系统正常作业情况下电机最高频率数值为300Hz,对应两个坐标轴q和d的电感数值分为0.95mH、0.67mH,电机极对数为4。
本次实验平台的核心控制器为TMS320F28335,系统作业期间,设置控制中断周期数值为250 。
2、永磁系统直流侧振荡抑制测试分析
本次实验采用对比分析法,设置两种工况,其中一种工况是未运用本文提出的抑制方法,生成波形为图3(a),另外一种工况是运用本文提出的抑制方法,生成波形为图3(c)。图3(b)为与图3(a)相同工况下的放大运行波形,图3(d)为与图3(c)相同工况下的实验稳态波形。
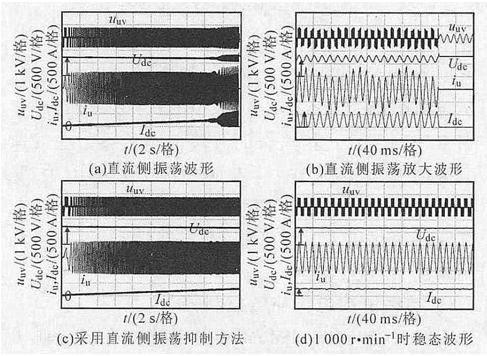
图3 直流侧振荡抑制效果
对比图3(a)和图3(c)中的振荡波形可知,未运用本文提出的控制方案条件下,直流侧振荡波形稳定性较低,运用本文提出的控制方案,电机母线和电流作业状态均处于正常状态,系统作业较为平稳。观察图3(a)和图3(b),当电机转速逐渐增加时,电机作业功率发生变化,也呈现出持续上升趋势,在此条件下直流侧开始产生谐振,同时伴随着电机电流谐振。从理论层面上,母线谐振频率大约为94Hz,但是当前波形分布中谐振频率为57Hz。由此可以判断,回路中还存在一些电感影响因素。从图3(c)波形变化规律可以看出,运用本文提出的控制方法后,电机作业产生的电流趋于平稳,直流侧未出现振荡。为了更加清晰地展现该结论,对图3(c)的波形进行放大,得到如图3(d)所示的稳态波形,验证了电压补偿方法在本控制方案中的控制作用。所以,选择电压补偿方法作为抑制优化处理工具,可行性较高。
总结
本文围绕永磁系统直流侧振荡问题展开研究,尝试在现有研究基础上,优化直流侧振荡抑制方法。本次研究选择的抑制优化工具为电压补偿方法,该优化方案是以滤波作为改善工具,在滤波处理作用下产生扰动量,将此部分扰动量放大 倍,同时前馈解耦电压中,以此补偿抑制电流侧振荡。实验测试结果表明,本文提出的补偿控制方案能够有效抑制直流侧振荡,有助于系统稳定运行。
参考文献
[1]张强,王勇,苟铖.基于电压补偿的低速永磁电机谐波抑制控制策略研究[J].电测与仪表, 2019,56(7):113-118.
[2]程苗苗,郑月松,程龙,等.基于直流侧电容最小化的无功补偿技术及其控制策略研究[J]. 电力系统及其自动化学报,2019,31(12):1-9.
[3]李生民,梁吉宁,肖亚敏.基于级联型SOGI的永磁同步电机谐波电流抑制方法研究[J]. 电机与控制应用,2019(8):31-36.
[4]黄旭程,刘亚丽,陈燕东,等.直流电网阻抗建模与振荡机理及稳定控制方法[J].电力系统保护与控制,2020,48(7):108-117.
[5]陈烁,任永峰,薛宇,等.基于SVPWM的直驱永磁同步风电系统GS-NSC研究[J].可再生能源,2020,265(9):78-84.
基金项目:本文为河北省人力资源和社会保障课题《产教融合背景下技工院校实训体系构建-以工业机器人应用与维护专业为例》,课题编号“JRS-2021-7136”的研究成果。
