一种DSP控制的永磁同步电机控制系统硬件设计
(衡水技师学院(衡水科技工程学校),河北省衡水, 053000)
基金项目:本文为河北省人力资源和社会保障课题《产教融合背景下技工院校实训体系构建-以工业机器人应用与维护专业为例》,课题编号“JRS-2021-7136”的研究成果。
摘要:为了改善永磁同步电机控制性能,本文以小功率电机为例,选取DSP芯片作为控制器,提出永磁同步电机控制系统硬件设计研究。该系统硬件主要由3部分组成,包括主功率电路、信号检测电路、系统供电电路,根据小功率电机作业控制要求,为各个电路选取元器件,讨论参数计算方法,并对系统设计方案加以测试分析。测试结果显示,本系统的调速作业静态性能和动态性能都很好,且满足稳压控制要求。
关键词:永磁同步电机;信号检测;功率驱动
永磁同步电机是一种作业效率较高、损耗偏低、体积较小、功率密度偏高的设备作业控制装置,在多个领域均有所应用[1]。例如,工业控制、机械制造等。为了充分发挥装置作用,需要为其配备相应的控制器,在该装置的驱动下开始高效运转[2]。目前,控制器的主要控制芯片以单片机或者DSP为主,相比之下,单片机的运算处理能力偏低,而永磁同步电机对于运算处理需求较高,所以DPS芯片成为了首要选择对象[3]。功率驱动单元作为重要组成结构,主要以IPM单元和IGBT单元为主,前者的电路相对简单,安全性能较高[4]。所以,本文尝试选择DSP作为核心控制芯片,利用IPM单元开发功率驱动模块,提出永磁同步电机控制系统硬件设计研究。
一、永磁同步电机控制系统架构设计
电机驱动控制系统主要利用DSP2812芯片进行控制,利用该芯片控制各个设备,而功率的驱动部分,则是利用IPM逆变器进行驱动,从而使得电机得以正常作业。如图1所示为电机控制系统整体架构。
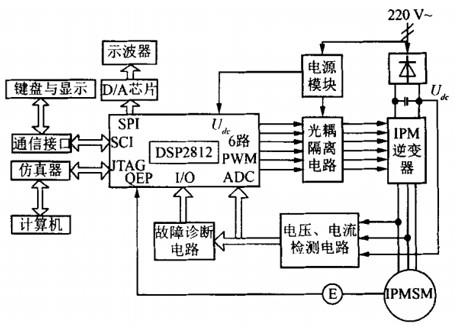
图1 电机控制系统整体架构
该系统硬件架构主要分为两部分,其中一部分为控制硬件电路,另外一部分为功率驱动硬件电路。另外,辅助电路包括供电电路和信号检测电路。考虑到控制电路在作业期间容易受功率驱动电路中高压侧的干扰,所以本系统架构在两部分电路连接处增加了光耦隔离电路。本系统对于电机作业状态的控制,需要根据信号采集情况下达命令,为了实现信号处理,本系统增加了信号处理器,为其选取TMS320F2812作为核心控制芯片。对于逆变器的应用,则是以内部功率开关作为主要控制装置,通过调节电流幅值和频率,将电路中当前流动的电流转换为三相交流电源,以此驱动电机正常作业。
二、系统硬件电路设计
1、主功率电路设计
(1)整流电路
本系统选取小功率电机作为控制对象,搭建单相整流电路结构。向电路中接入220V交流电压,综合考虑二极管最大承受电源、直流母线电压波动、裕量设置等多项影响因素,系统作业电压应该在682V以上。电机开启作业瞬间,产生的电流会超出额定电流5~7倍,为了满足电路中电压和电流作业需求,最终选取KBRC3510整流桥电路作为电机控制电路。其中,额定电流为35A,额定电压为1000V。
考虑到电路中存在大容量滤波电容,系统上电瞬间会产生充电电流,由于这个电流较大,可能导致驱动回路发生短路问题,所以在此处添加限流电阻非常重要,起到一定电路保护作用。本系统针对此问题,增加了软启动电路。如图2所示为软启动电路。
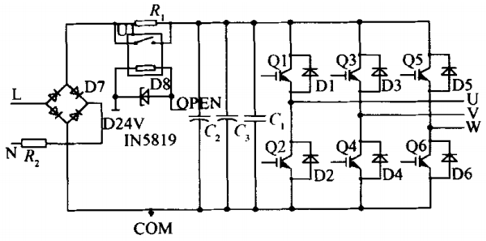
图2软启动电路
图2中, 为继电器,与水泥电阻 并联,电容 和 均为大容量电解电容。该电路在开关作用下,下达控制继电器作业命令OPEN。为了暂态期间电路限流要求,本电路中添加的限流电阻 的功率偏小,选择 规格电阻作为限流电阻,采用串联方式,与直流母线建立线路连接,从而缓解主回路电流冲击问题。系统上电后,电流流经电阻 后,为电路中的电容充电。对于继电器闭合的操作,以线路中的动力电作为控制信号,如果监测到该信号,则延时500ms闭合继电器。
(2)滤波电路
为了电机作业稳定性,本系统硬件电路中添加了大电解电容,经过稳压滤波处理后,输出符合电机稳定作业的电压和电流。其中,电解电容的添加,可以采取吸收纹波能量方式,以0.5个周期作为计算周期,要求谷点电压 经过充电处理后电量可以得到电网峰值电压 对应的存储能量作为输出能量。以下为滤波电路能量关系计算公式:
公式(1)中, 代表电网频率; 代表电机额定功率; 代表峰值电压; 代表谷点电压。系统作业期间,要求电路中的纹波电压峰值不得超过40V,根据该要求,可以计算峰值电压和谷点电压:
, ,经过计算可以得到电容C为1116.84 。
线路经过滤波和整流处理后,产生母线电压最大值,该数值约为310V。为了满足电解电容控制需求,本系统在布设滤波电路时,选取规格为 电容连接到线路中,数量为2,采用的连接方式为并联,与直流母线两端点连接。另外,考虑到电解电容内部的电感参数较大,无法在高频环境中发挥作用,所以本系统在搭建滤波电路时,选择规格为 电容作为电路电解电容 ,该电容属于无级性电容,利用此电阻,滤除电路中的高频纹波。
(3)逆变电路
为了提升系统作业安全性能,本设计方案在系统硬件架构中添加了逆变电路,以PS21865作为控制器,结构如图3所示。
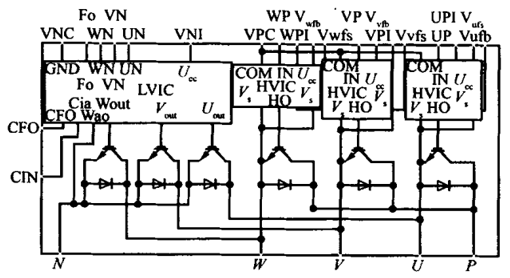
图3逆变电路
该电路中阻断电压最高值为600V,流经电流最大值为20A,输出功率大小为1.5kW。控制开关时间的设置,按键“开”时间设置 ,按键“关”时间设置 ,符合系统正常作业要求。该控制器内部分布多个IGBT,并且由多个逆变输入接口和输出接口与其他装置建立通信连接。其中直流母线的输入接口有两个,分别是接口P和接口N,逆变输出接口有3个,分别是接口W、接口V、接口U。其中,逆变接口与定子绕组连接。另外,线路中的故障信号输出端为 ,驱动信号输入端为 , 相对应的桥臂电池地为 。
2、信号检测电路设计
(1)模拟信号与数字信号之间的转换
对于A/D转换,通过I/O接口,创建AD7606芯片的通信连接,实现模拟信号向数字信号的转换。该芯片支持200kb/s速率通信,可以高效处理数字信号,以并行处理的方式生成模拟信号。当CONVST引脚接收到高电平信号时,开始AD转换。
对于D/A转换,在DSP控制器串口部分连接AD5734芯片,将数字信号转换为模拟信号。该装置内部含有基准电压缓冲器,能够在当前电路环境中正常作业。
(2)检测电路
1)定子电流检测
本系统中永磁同步电机的连接方式为Y型,各线路电流之间的关系满足: 。因此,在检测定子电流时,只需要测量2相。本文以U相定子电流检测为例,设计检测电路。
该电路利用型号为CS040GT霍尔传感器采集定子电流,在一次侧输入的额定电流大小为 ,该电路环境下二次侧输出额定电压范围1.5~3.5V。两个参数之间的关系,运用软件模拟获取:
公式(2)中, 代表输出电压; 代表输入电流。
2)母线电压检测
本系统中三相定子电压,即U相、W相、V相,需要根据检测直流母线电压,结合观察当前逆变器开关作业状态计算获取。考虑到电路中的电压为直流电压,所以本系统采用电阻分压的方式采集电压信息。如图4所示为母线电压采集电路。
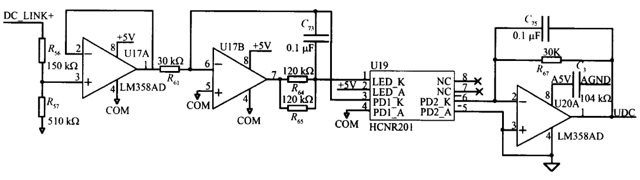
图4母线电压采集电路
该电路中,以直流母线电压限定范围,设定分压电阻数值,分别为 。前者为功率电阻,后者为贴片电阻。为了改善电路的阻抗性能和隔离作用,在分压电路后增加了电压跟随器,与模拟光电耦合器共同作业,调节电路中的隔离信号。该电路输出信号为模拟信号,经过A/D转换处理后生成数字信号,利用TMS320F2812计算信号数据。
3)转速检测
永磁同步电机对转速测量要求较高,普通的编码器不满足转速检测要求,本系统选择混合式编码器作为转速检测工具。
3、系统供电电路设计
本系统供电,选取直流电源作为系统中各个模块作业供电工具。为了避免各个模块之间的供电相互干扰,本系统供电采取相互隔离的方式供电,根据设备额定电压情况,分别为其配备供电电路,方案如图5所示。
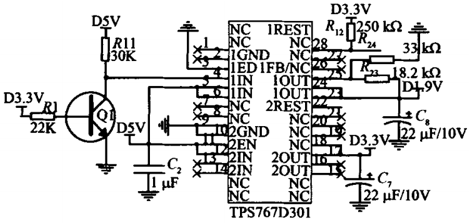
图5 系统供电电路
三、系统测试分析
1、试验测试环境
本次系统测试主要是为了检验永磁同步电机控制系统功能,按照系统硬件电路设计方案连接硬件设备,搭建电机控制系统,该系统测试在CCSv3.3环境中开启。其中,电机作业功率为1.3kW,电路中连接的电机负载为1.5kW。关于电机的主要参数设置,包括额定转速、额定转矩、额定功率、额定电流和额定电压,参数数值依次为2500r/min、5 、1.3kW、5A、220V。
2、试验测试结果分析
本次试验中,设定电机的作业频率为10kHz,转速时间间隔设置为1ms,电流与电压的采样时间间隔为100 。根据电机作业环境需求,分别设置各个调节器参数数值。另外,给定电机转速750 ,单相交流电为150V。在定子磁链恒定情况下,利用示波器读取转速响应、转矩响应、直流母线电压、a相电流、稳态a相电流数据。
试验波形显示,转速响应上升耗费600ms,稳态误差和超调量都很小,产生的转矩脉动也比较小。由此可以判断,系统调速作业静态性能和动态性能都很好。另外,相电流波形与正弦规律相符,且母线电压输出波形未出现脉动,满足稳压控制要求。总体来看,本系统硬件设计方案,符合永磁同步电机控制要求,可以作为电机控制工具。
总结
本文围绕永磁同步电机控制方法展开研究,选择DSP控制器作为系统开发工具,尝试开发一套电机控制系统硬件设计方案。本系统开发以主功率电路、信号检测电路、系统供电电路为主,合理选择电路控制芯片,并为其搭建硬件电路。综合考虑系统作业对电路环境的要求,本系统添加了KBRC3510整流桥电路、软启动等多种电路。测试结果显示,本系统作业产生的稳态误差、超调量、转矩脉动较小,并且母线电压输出波形较为稳定,符合系统开发要求。
参考文献
[1]宋建国,苗世亮,张晨浩.基于DSP的双定子永磁同步电机控制系统设计[J].电力电子技术,2019,324(11):25-28,32.
[2]赵钢,朱奥辞,张世忠.基于HIL的永磁同步电机矢量控制系统的开发[J].电测与仪表, 2019,722(21):125-129,160.
[3]杨泽贤,朱雨菲,陈瑜涵,等.基于RTU平台的永磁同步电机无位置传感器控制算法[J]. 电机与控制应用,2020,361(1):32-38.
[4]孙宇航,姚文熙,吕征宇.基于电流估算的永磁同步电机伺服控制系统设计[J].微特电机, 2020,48(2):29-33.
