基于工业机器人的智能制造单元设计
(江苏省徐州经贸高等职业学校,江苏徐州 221004)
[摘 要]工业生产机器人作为我国现代工业生产机械化、自动化建设发展的重要体现,在人工智能技术高速发展的时代背景下,基于工业机器人开展智能制造单元设计,对于我国工业生产智能化发展有着重要意义。分析基于工业机器人的智能制造单元设计的意义,提出其实际设计中的硬件搭建方式与软件设计方法,研究其控制技术和通信系统的设计方案,全面实现工业机器人的智能化控制发展。
[关键词]工业机器人;智能化;智能制造单元;硬件架构;软件设计
[中图分类号] [文献标志码]A
智能制造是新时期我国工业发展的重要目标,在工业生产智能化的实现过程中,工业机器人是核心设备之一,是智能技术体系的承载体。在工业机器人智能化生产实现过程中,需要通过智能制造单元的设计与应用,实现对现代工业机器人生产制造模式的改变。在智能制造单元设计的实际过程中,涉及到硬件架构设计、软件系统设计以及控制与通信系统设计等诸多内容,需要保证每一个设计环节的科学化开展。
1 基于工业机器人的智能制造单元设计意义
工业是我国社会经济发展的重要基础,工业机器人作为当前工业生产的核心设备,很大程度上实现了对工业生产中人工的代替,实现了工业生产机械化。随着我国人工智能技术体系的发展与进步,将智能技术体系应用到工业机器人中,提升工业机械人的智能化作业能力,对于我国工业制造发展有着重要意义。首先是经济意义。相较于传统工业生产的人工制造,智能技术的应用与实践能够控制其生产成本投入,随着工业生产规模的逐渐扩大,工业生产制造中的人工成本投入逐渐增加,这也是当前工业机器人逐渐替代人工制造的主要原因之一。工业机器人的智能制造应用,节约了工业产业人工成本,后期仅需要投入微量的维护成本,这对于新时期的工业生产发展有着重要意义。
2 基于工业机器人的智能制造单元的硬件结构设计
在基于工业机器人的智能制造单元设计中,硬件结构设计是其单元设计的基础,对于工业机器人的智能化制造实现有着重要意义。在工业机器人的智能制造单元设计中,需要根据工业机器人工业制造实际情况进行硬件系统的构建,常规的工业生产制造实践中,智能制造单元的工作流程涉及到原材料上下、加工、检测以及分拣等功能。在基于工业机器人的智能制造单元设计中,其硬件系统构建的工作流程如图1所示。
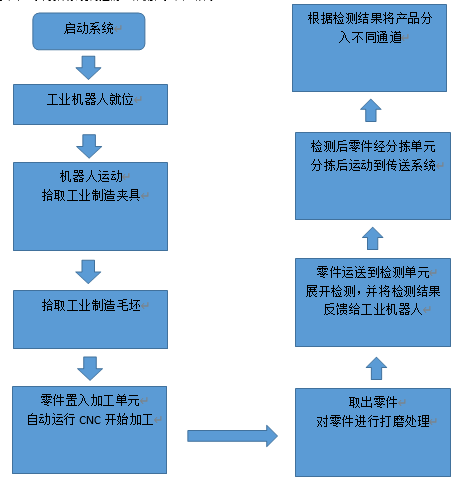
图1 工业机器人智能化制造工作流程
在基于工业机器人的智能制造单元设计的硬件系统构建中,主要硬件结构包含总控系统、存储单元、执行系统、加工系统、检测系统、分拣单元以及相关辅助设施等。实际设计中,总控系统由PLC控制系统实现,存储单元即制造系统的自动料仓,执行单元就是工业机器人,加工单元即工业生产线的数控机床,检测单元为CCD。
在基于工业机器人的智能制造单元硬件系统构建中,总控系统是硬件系统构建的核心内容。为全面保证工业机器人生产制造作业的自动化开展,应使用PLC控制系统实现,通过PLC控制系统的远程控制与自动化控制,能够实现对硬件系统结构中执行、加工、分拣、仓储、检测等功能系统的通信与控制。实际设计中,可以采用西门子S7-1200系列PLC控制设备。存储单元是工业机器人智能制造单元中的料仓结构,是工业生产原材料以及料坯的储存位置。存储单元能够根据总控系统的指令,将相关材料推出,实现工业机器人生产实践中材料的取用。执行单元就是工业机器人,根据总控系统的制造指令进行生产作业。加工单元是工业生产的数控机床,根据工业制造的设计需求进行工业制造作业。实际过程中,可以选择西门子828D作为加工单元的系统结构,能够满足智能制造单元设计的实际需求。打磨单元通过气缸控制实现,在现代工业生产制造的打磨系统设计中,也可以通过工业机器人实现。将工业机器人的末端工具替换为打磨系统,然后通过系统编程,通过工业机器人实现对零件的打磨处理。分拣单元由气缸和传送系统共同构成,根据总控系统输出指令对传统系统的状态进行控制,根据气缸的动作顺序,将打磨好的零件分拣出来。检测单元是根据对零件的检测,将结果反馈给总控系统。总控系统根据检测结果数据对气缸进行控制,将不同检测数据的零件分类处理。
3 基于工业机器人的智能制造单元的软件系统设计
在基于工业机器人的智能制造单元设计中,软件系统设计直接决定了智能制造单元的实际运行效果。在实际设计过程中,软件设计的要点内容就是工业机器人主程序的设计,是工业机器人作业效果和工业制造效率的关键因素。一般情况下,在工业机器人智能制造单元主程序设计的实际过程中,也需要根据其工业生产应用的上下料路径以及生产线流程图进行。通过主程序进行I/O信号的设置、程序数据的构建、目标点的示教。基于工业机器人的智能制造单元设计中,其软件系统主程序设计代码主要包含以下方面:
rHome;
rServo 250,3;
rGetTool 3;
rServo 760,3;
rCNC;
rPutHalfProduct;
rServo 250,3;
rPutTool 3;
rServo 10,3;
rGetTool 1;
rServo 550,3;
RPolish;
rServo 10,3;
PROC main()
ht sanjiaoxing0
ht fangxing0
ht_ yuanxing0
ht_ wujiaoxing0
Moveht home, v200,0 fine, tol0o
ENDPROC
4 基于工业机器人的智能制造单元的控制及通信系统设计
控制与通信系统是工业机器人实现智能化制造的关键,也是工业机器人智能制造单元设计过程中的重点内容。在设计中,控制系统需要使用西门子S7-1200系列的PLC自动化控制系统,型号选择为SIMAT-IC S7-1200,是新一代的自动化控制系统,其内部集成了人机界面和网络控制,对于新时期工业生产应用以及工业机器人的使用都有着重要意义。通信系统设计则可以采用S7-1200 CPU 1212C型,其中含有5个IO模块远程控制系统,能够实现对工业机器人的远程控制输出,其通信过程如图2所示。通信系统的IO模块进行通信时,远程IO模块通信的输出与输入设计见表1。

图2 通信系统设计的通信过程
表1 工业机器人通信信号对照
机器人信号名称 数据类型 地址
ROB允许请求 Bool %l 18.2
ROB放料完成 Bool %l 18.3
ROB取料完成 Bool %l 18.4
请求放轮毂 Bool %l 18.5
轮毂到位 Bool %l 18.6
打磨作业1 Bool %l 18.7
打磨作业2 Bool %l 19.0
请求吹气 Bool %l 19.1
放成品 Bool %l 19.2
CCD确认 Bool %l 19.3
5 结语
基于工业机器人的智能制造单元设计是实现我国工业产业生产制造智能化发展的必然途径。在实际设计中,需要注重其硬件系统架构设计、软件系统设计以及控制和通信系统设计,以保证工业机器人智能化建设的稳定性和可靠性。
参考文献
[1] 陈涛,杲春芳.基于工业机器人的智能制造单元设计[J].自动化技术与应用,2019(10):29-32.
[2] 冯振华.分析工业机器人的“智能制造”柔性生产线设计[J].内燃机与配件,2019(13):125-126.
[3] 吴斌.基于工业机器人的智能制造生产线设计[J].机床与液压,2020,48(23):60-64.
作者简介:贾会会(1974—),女,江苏徐州人,本科,副教授,主要从事智能制造、数控加工方面的教学与研究。
