任务驱动式教学模式的实践研究——以《机器人冰球》一课为例
(上海市师资培训中心附属闵行实验中学 上海闵行 201199)
摘要:机器人教育在国内教育领域越来越重视,竞赛模式或兴趣小组模式吸引了一部分学生参与,然而普及性的机器人教育有待发展。本研究提出的任务驱动式教学模式的课堂实践研究,激发学生学习机器人的兴趣和培养创新实践能力。课程设计包含“创设情境、激趣引入,新课讲授、构建新知,突破难点、进阶提升,总结归纳、提高升华”四个过程。课堂中发布任务让学生小组合作实践,实现目标性、导向性和定向性的探究以及交织性、混合性和互动性的探究。机器人课程不仅仅是教会学生怎么解决一个具体的问题,也不仅仅是教会学生怎么搭建机器人、操作编程软件,更重要的是培养学生探究任务的思维方式以及学生对于解决问题的理解和掌握,并较深刻的认识和领悟。
关键词:任务驱动式 教学模式 课程设计
机器人教育在国内教育领域越来越重视,竞赛模式或兴趣小组模式吸引了一部分学生参与,然而普及性的机器人教育有待发展。我们尝试了任务驱动式教学模式,发现有良好的实践效果。我尝试用《机器人冰球》一课的教学设计和学生课堂实践的反馈阐释任务驱动式教学模式的教学过程。
一、任务驱动式教学模式的教学流程
任务驱动式教学模式是一种建立在建构主义学习理论基础上的教学模式,它将以往以传授知识为主的传统教学理念,转变为以解决问题、完成任务为主的多维互动式的教学理念;将再现式教学转变为探究式学习,使学生处于积极的学习状态,每一位学生都能根据自己对当前问题的理解,运用共有的知识和自己特有的经验提出方案、解决问题[1]。
任务驱动教学法以学生的需求为出发点,主导者是教师、主体是学生,将所要学习的新知识隐藏在教学任务中,使学生在真实情境的任务驱动下,通过小组协作探究进行学习。与传统教学方法相比,这种教学模式更能体现以学生为主体,更能培养学生的分析能力与实践能力[2]。
图1是任务驱动式教学模式中采用的教学流程, 图2为任务实践流程。教学设计框架是在相关理论支撑下进行设计,并经过几轮实践经验的修改而完成的,它包含了“创设情境、激趣引入,新课讲授、构建新知,突破难点、进阶提升,总结归纳、提高升华”四个过程。“创设情境、激趣引入”这个环节,通常使用的方法为基于生活情境的引入;“新课讲授、构建新知”和“突破难点、进阶提升”是两个连续的问题解决的过程,它既可以是一个大问题的进阶的不同阶段,也可以是两个独立的但存在前后进阶关系的小问题的解决,但无论是哪种情况,都遵循着实践中出现的问题进行解决的一般过程:任务实践—发现问题—分析问题—解决问题—展示交流—任务改进—结果分享。其中,对于本研究中的机器人课程而言,分析问题主要是指学生利用自然语言描述问题解决的过程和思路,解决问题主要是根据自然语言描述编程调试与实践探索。“总结归纳、提高升华”主要是一般性方法的归纳、问题解决经验的总结以及提出更进一步的问题。
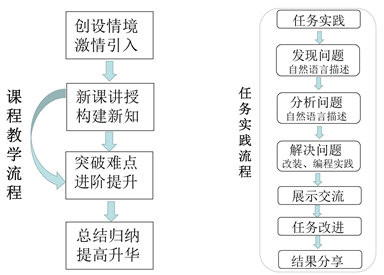
图1课程教学流程 图2任务实践流程
二、《机器人冰球》—课的具体实施
我校在六年级开设普及性的机器人校本课程已有十年,过程中充分利用学校现有的机器人创新实验室的乐高EV3机器人套件。现以《机器人冰球》一课的教学设计和学生课堂实践的反馈阐释任务驱动式教学模式的教学过程,主要任务是实现冰球快速破门得分。教学重点:机器人转弯程序的灵活应用;教学难点:自主实践与沟通交流后的进一步实践探索。
(一)创设情境、激趣引入
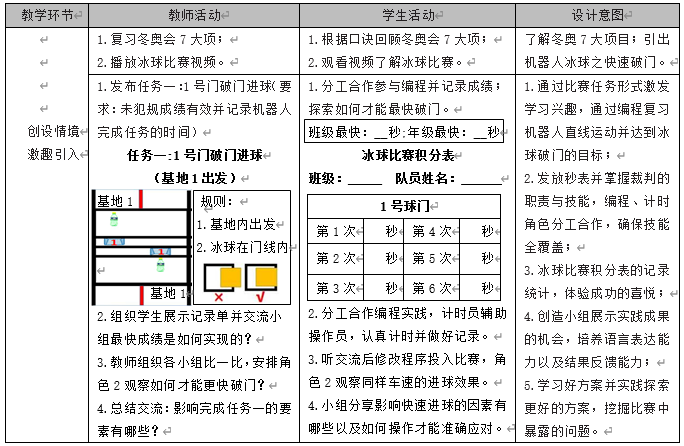
冬奥知识普及。冬奥会分七个大项:冰壶、冰球、雪车、雪橇、滑冰、滑雪和冬季两项,口诀为“两冰、两雪、两滑和一冬”便于学生记忆。教师播放冰球比赛视频,引出本课主题《机器人冰球》中重要环节:快速破门。本环节主要分为两部分,前一部分为复习巩固,主要是上节课学习的基于双电动机驱动的直行与后退程序的应用。借助任务一复习上节课内容,要求小组成员熟读规则并分工明确,确保每位学生体验各种角色(角色1:编程;角色2:计时;下一项任务角色交换)。
教学流程的第一个环节“创设情境、激趣引入”的教学设计如表1所示。
表1:创设情境、激趣引入
教师提出任务以后,各小组开始实践并通过小组测试并记录每次冰球破门时间,如图3所示。通过学生交流了解到第4次最快成绩产生的原因是:通过编程将电机前进速度调至100。
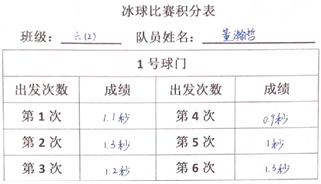
图3
各小组交流后得出结论:当机器人直线运动时,编程过程中电机速度调到最大100就能实现快速前进达到最快进球。各组同意以上结论并将速度调到100进行调试。教师根据任务实施的进度正确引导和激励学生,鼓励学生积极、大胆的参与任务实施,保证学生们自主合作学习的效率。
教师组织各小组比一比。要求角色1为操控手,角色2观察冰球如何才能更快破门?教师统一发令,组织6次统一比赛后,学生说:“为什么机器人速度调到100后还是出现了进球的快慢”。这时教师组织学生观察、交流,引导学生对解决问题所需的方法和策略进行探索。通过仔细观察后互相交流分享,总结出快速破门的要素如表2所示。
表2:探究任务一如何快速破门
影响冰球快速破门的要素有哪些? 如何操作准确应对? 涉及哪些方面?
1.程序中电机速度 1.电机速度调至最大100 编程
2.操作员听到发令后的反应速度 2.集中注意力且手指头放在触发键 策略与反应速度
3.出发位置到球门距离 3.机器人边缘贴线(俯视不出界) 策略
4.比赛场地平整度 4.赛前清洁场地 外界干扰
5.车轮大小 5.选择适合车身且尽可能大的车轮 硬件
任务一的探究方式属于目标性、导向性和定向性的探究。教师在学生探究开始前为了某种新的教学目标而做服务于目标的内容或者范畴的设定与指定,但对学生探究的结果并不会很明显或很明确地给出要求,至少不会有“标准答案”。探究结束时可以在教师的组织下进行各自的结果交流,交流后教师可以对学生的多种结果作一定的导向性界定、评价和指正。
(二)新课讲授、构建新知
本节课的重点在于利用程序中的转弯图标实现机器人的左转与右转并能在任务实践中灵活应用,教师通过编程演示机器人的左前转、右前转、左后转和右后转,学生可以直观的看到机器人根据程序灵活转动。程序见图4。

图4 机器人转弯程序
(三)突破难点、进阶提升
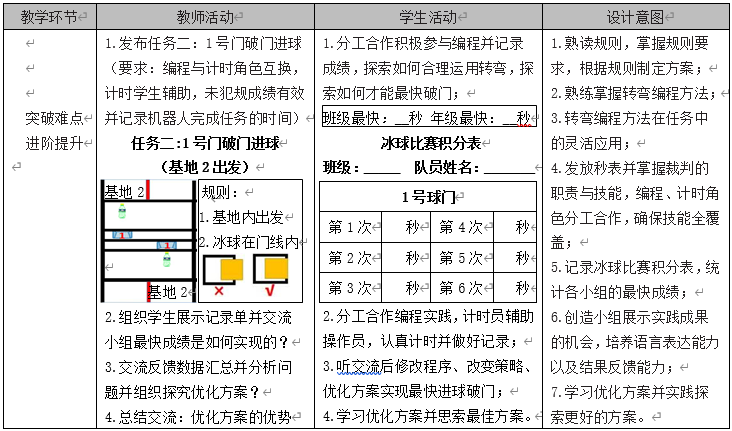
本部分任务设计的目的是让学生学会机器人转弯的编程并在任务实践中灵活应用。任务二的设计主要在任务一的基础上调整了出发位置,促使学生需要运用转弯的程序图标进行编程才能实现冰球在1号球门破门得分。任务二在任务一的铺垫下变得更加容易理解。教学中要求角色互换实现全员参与并小组合作完成,这种学习方式能够最大程度地提高学生的课堂参与度,发挥学生的主体性。本任务难度不高,确保所有学生能够实现机器人推动冰球破门,让学生在探究过程中体验到成功的喜悦。任务二的教学环节及各环节的教师活动、学生活动如表3所示。
表3:基地2出发探究如何快速破门
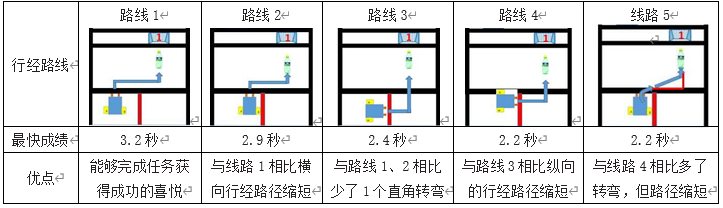
学生在任务一的基础上明确了如何提高机器人速度,实践过程中发现每个小组的策略完全不一样,由于任务的难度不是很高,学生们都能完成任务二,在课堂上也感受到了破门的喜悦,教师组织各小组登台分享自己的实践策略并共同分析。让学生先自己独立分析、再小组整合,同时可以集思广益列举实例予以论证。可以发现各小组机器人的行经路线有很大的不同,学生们也分析了每条路线的优势,基地2出发机器人行经路径优势分析汇总如表4所示。
表4:基地2出发机器人行经路径优势分析
师生互动交流及方案优化环节(S代表学生T代表教师)
S学生们听了各小组的分享交流后发现以下问题:
机器人居然能够横向出发?
线路4与线路5的完成任务的时间一样?
T教师组织学生再一次熟读规则,根据规则了解到机器人从基地内出发,学生意识到了机器人横向摆放也在基地内,完全符合要求没有犯规。教师再提问:为什么线路5转了两次弯但是最后的成绩与线路4一样?
S学生积极思考并交流反馈:线路4比线路5少转1次弯;线路4与线路5的转弯的角度都是90°;线路5的横向的行经路径正好是直角三角形的斜边,线路4的行经路径是直角三角形的两条直角边,根据三角形定律“三角形两边之和大于第三边”得出:线路5的行经路径比线路4的行经路径短。
ST结论:线路4与5相比,线路4少转一次弯但行经路径长,线路5多转一次弯但行经路径短。
学生们掌握了规则的奥秘后,意识到机器人出发位置的摆放是很重要的策略;了解线路5的优势(路径最短)并提出了更优化的实践方案,机器人在基地内斜向出发,避免了一次转弯,行经最短路径如表5所示。
表5:优化方案

任务二的探究属于交织性、混合性和互动性探究。这种类型的探究主要是教师会较为明确地给出探究的准确目的(但也不一定只有一个答案)和结果要求,然后容许学生朝着确定的目标进行开放式的探究。当然,过程中间可能因为互动性的考虑,教师会在探究的某个进程位置再给定向性探究的一个范例(学生在实验中每一次自主性尝试都可能并不合乎标准,但却是富有意义的,会引发特别的关注和思考)予一定的指向或者要求,体现出学生与教师的一定的交互性,不过仍旧在大多数时候放任学生自由进行。
(四)总结归纳、提高升华
教师带领学生总结本课内容并提炼升华,形成任务实践中问题解决的具体方法与步骤。教师在评价总结中应包括学生对知识点的掌握和应用的评价;学生自主学习能力的评价;学生间相互协作能力的评价;学生创新能力的评价等。
三、任务驱动式教学模式在机器人课堂教学中的意义
(一)能激发学习兴趣
在任务驱动的学习过程中,通过小组自主探究完成任务,让学生感受到完成任务后的喜悦感,课堂实践中的一次次成功,使学生找回自信,从而激发学习兴趣。
(二)能提高学习效率
将知识点融入课堂任务,学生小组合作积极参与任务并完成任务,从而掌握相关知识点,从枯燥乏味的被动学习变成挑战有趣任务的主动学习,大大提高了学习效率。
(三)能培养创新精神和实践能力
在任务驱动式教学模式中,亲自动手实践,小组分工合作,探究成果分享,听取分享后学会分析并确定小组认可的方案,从而引发更深层次的创新实践研究来实现自己的目标,培养学生创新精神和实践能力。
机器人课程不只是教会学生怎么解决一个具体的问题,也不仅仅是教会学生怎么搭建机器人、操作编程软件,更重要的是培养学生探究任务的思维方式以及学生对于解决问题的理解和掌握,并较深刻的认识和领悟。
参考文献
[1]钱晓莆,马玉娟.试论“任务驱动”[J].中国电化教育,2002,9.
[2]王正雄.“任务驱动”教学法在物理教学中的运用[J].中学物理教学参考,2003,(8).
