智能储物柜的设计与研究
(重庆移通学院 重庆合川 401520;泰山科技学院 山东泰安 271038)
摘要:本设计产品名为智能储物柜,其本身的出发点是增加生活的便利性。我们借鉴于摩天轮结构,通过模仿摩天轮,设计了一个存取物品的密封旋转式储物箱,本产品为一个小型摩天轮结构,其主体结构由四根支柱支撑,八根丝杠分为上下两层对应安装在主体的上下端,在每两根对应的丝杠上安装了两个柜体,共八个柜体,满足于各类物品分类存放,各个柜体之间相互独立互不影响,每两根丝杠上的两个柜体可以前后移动,整个柜体可进行顺时针或逆时针的旋转,使柜体柜口到达取物口位置。我们将每个柜体进行编号,把控制程序写入单片机中,通过遥控器,就可根据柜体编号直接选择所需柜体,然后对应柜体便会自动移动至取物口处,伸手即可存取。操作方便快捷。解决了存放位置固定,放置物品费力,不方便存取等问题。
关键词:智能储物柜;遥控器;
1 前言
目前市场上的储物柜大致可分为两类。第一类是普通木质储物柜,这也是大多数家庭所使用的。对于这类储物柜,其柜内空间按照柜体尺寸进行从高到低的划分,当我们需要拿东西的时候,常常因为柜子的繁多而不知道自己所需物品到底存放在哪一个柜子中,翻箱倒柜的寻找费时费力。并且高层的柜子及其不方便使用。
第二类电子储物柜,则类似于超市门口的储物柜,每一个柜子独立控制,就导致操作不便,并且高层柜子同样存在存取不便的问题。
2 总体设计思路
储物柜是每个家庭的生活必备家具,而拿取柜子高低层的物品及其不方便,以及各类物品存放驳杂,难以寻找需要的东西,而导致费时费力。基于这个原因我们准备设计这款智能储物柜,本项目预设8个柜子,对每个柜子进行编号,以单片机编程作为核心控制部分、继电器的常开常闭实现电机的正反转、微动开关和时间的控制来确定柜子的位置以及能实现自动开关柜门。从而达到方便取物的目的。
3 技术路线:
如图1所示为控制涡轮蜗杆的电机以及柜门电机的电路图。图中有继电器(KA1、KA2、KA3、KA4、KA8、KA9),电机(M1、M4),微动开关,电源。当只有KA3有信号输入时M1正转,此时触碰到微动开关M1停止转动,当KA3与KA4同时有信号输入时,及时触碰到微动开关M1也能正常正转,所以只是要合理安装微动开关的位置以及确保KA4信号输入的时机就能保证柜体准确停在柜门处。
当KA1、KA2同时输入信号且A3有信号输入时,M1反转,同正转的原理合理控制KA4信号输入时机即可实现细长杆的复位操作。
柜门关闭的时候刚好触发微动开关,所以当用户选择柜子时需要同时给KA8、KA9信号此时M4不受微动开关影响向左滑动打开柜门,一定时间后撤销KA8、KA9信号,柜门停止滑动。当柜子处于复位状态时,同时给KA1、KA2、KA8信号,M4反转,向右滑动关闭柜门,当柜门触发微动开关M4停止转动柜门关闭完成。
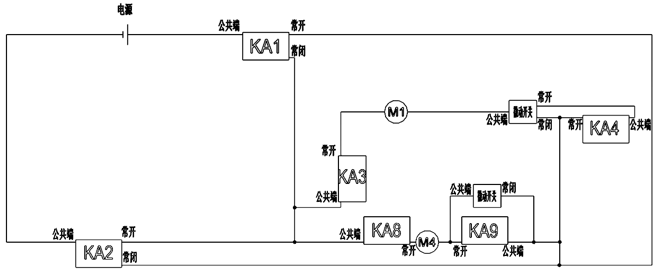
图1控制涡轮蜗杆的电机以及柜门电机的电路图
如图2所示为嵌入杆中两个电机的电路图。图中有继电器(KA5、KA6、KA7),电机(M2、M3),电源。当KA7有信号输入时M2、M3同时正转,即可带动细长杆上丝杆正转,从而与丝杠螺母连接的柜子就能在细长杆上移动。同理KA5、KA6同时输入信号且KA7输入信号时,M2、M3反转,柜子反向移动。通过控制信号输入时间就能做到控柜子在丝杠上移动的位移。
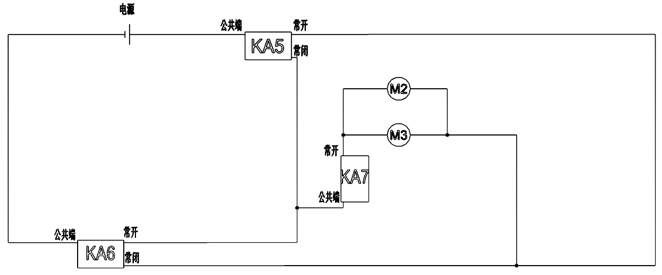
图2嵌入杆中两个电机的电路图
上述继电器信号输入全由单片机控制,再配合遥控器就能实现用户想用哪个柜子就能让哪个柜子准确停到柜门处,且自动开起或关闭柜门。
4 智能储物柜的工作流程如图3所示:
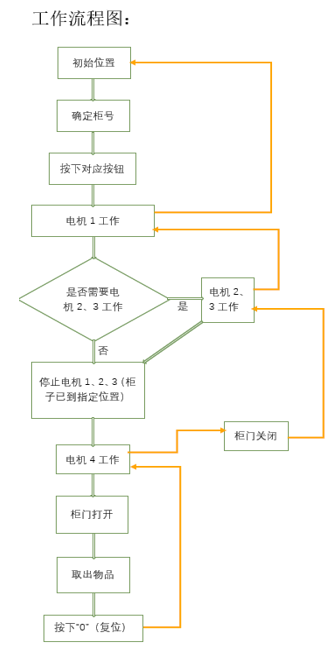
图3 工作流程图
5 智能储物柜的各部分实物模型
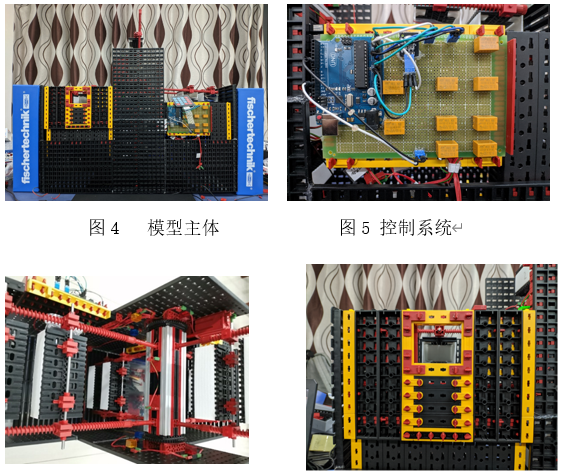
图6内部结构 图7 柜门
6 创新点
本产品将储物柜内部进行了改进,打破了传统储物柜内部结构不可变,解决了存放位置固定,放置物品费力,不方便存取等问题。针对老年人独自生活,拿取重物费力的题,在箱体内首次安放了摩天轮旋转结构,而不是将其内部空间进行不同规格的固定划分。
整个箱体密封,只留有一处取物口,取物口设置在适当的高度,通过控制面板可以将箱体中各个柜体旋转至取物口处,伸手即可存取物品。整个机构共设置8个柜体可实现不同物品的分类存放。八个柜子分别编号为1-8号,只需按下遥控器上对应数字便可将对应柜子移动至取物口处,操作方便快捷。各个柜子之间相互独立,不会影响其它柜子的工作。
张涛然,男,(1984.10-),山东德州人,硕士研究生,副教授,研究方向:制造过程的数值仿真。
基金项目: 重庆市高等教育教学改革研究项目(项目编号:213460);重庆市大学生创新创业训练计划项目(项目编号:S202013627005)。
