机械设计创新大赛设计说明书:地震废墟搜救装置的研究
一.引言
地震、矿难、火灾、洪水等灾害事件经常在报刊媒体中报道,特别是如2008年512汶川地震和今年四川玉树的地震更是给某个区域人民的生命财产造成了重大的损失,牵动着亿万人民的心。自然灾害尽管可以采取一些预防措施,例如提高建筑物的抗震等级,加强基础设施的建设,对全民进行灾害预防与应对的安全教育等,也可能采取一些方法进行预测,但总的来说,自然灾害往往是无法准确预测的,也是无法避免的,而且一旦发生了就会给人民的生产生活造成很大的损失。如何能在大的灾害发生后展开救援,将灾害造成的损失降低到最低程度,将是一件非常有意义的事情。也许也正是因为这个原因,2010年第四届大学生机械设计创新大赛的主题被定义为:“珍爱生命,奉献社会”。内容为“在突发灾难中,用于救援、破障、逃生、避难的机械产品的设计与制作”。应该说是非常适时的。
二.总体设计
我们的参赛作品也想紧扣这一主题而展开。参赛作品的题目暂定为:地震废墟搜救装置的研究。之所以定这样的题目,是由于地震往往对一个区域造成很严重的破坏,而对幸存者的搜救是否及时,将直接影响到生还者的数量,和伤者将来造成损害的大小以及将来恢复的情况。从原理上说,该作品也能够用于其它类型灾难的救助。
2.1 基本设计概念
设计这套废墟搜救装置的目的是我们希望给救援人员在正式展开救灾活前能预先对需要救援的现场进行评估,这样可以较合理的分配救援的人力物力,选择需要携带的装备和援助物资等,以提高救援效率、避免救援人员的不必要的伤亡和损失。为此,我们需要一套小型侦测系统,操作者在远端可以对其进行操纵,了解其运动的方位,并感知现场的信息,例如图像,声音、温度、辐射量、湿度、瓦斯浓度等。对现场的损害进行评估,为后面进行的搜救活动做好准备。
2.2 系统介绍
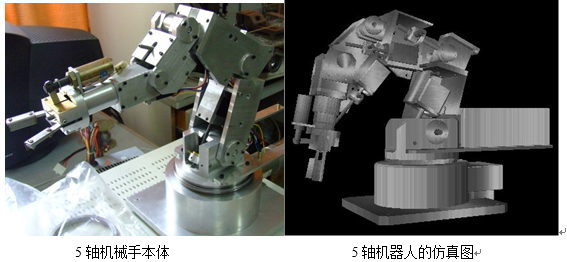
由于我们主要是针对现场搜救的预先评估,我们采用了轮式运动底盘,在底盘上设计了一套全方位机械手臂系统,该机机械手臂有5个自由度,采用步进电机驱动,其外观图如图所示。右图为其仿真模型。在该手臂安装有手抓,可用于抓取现场样品或者是清除障碍物。
在本体上安装有GPS定位系统,操作者可实时掌握探测器所处的位置。在移动平台上安装有带云台的摄像头,视频图像被传输到远端。操作者在远端能操纵摄像头的云台对现场进行观察。为了能在黑夜进行观察,在摄像头上还安装了激光远红外照明装置,可照亮30-50M距离范围内的景物,而功率只有3-4W,一方面降低了功耗,另一方面由于采用的是远红外波长进行照明,人眼看不到,避免了对现场的干扰。在平台上还采用了高灵敏度的声音传感器,最远可感知30米范围内的声响,这对于现场勘测甚至是探测生命迹象信息也是非常重要的。在探测机构上还安装了温度传感器、湿度传感器,根据需要还可挂载瓦斯浓度传感器、辐射传感器等,通过无线传感网络传输给操作者便于更详细的获得信息。
整个搜救装置的控制器主要由三部分组成,一是运动底盘控制器,主要控制运动底盘的运动。二是机械手控制器,主要控制机械手的运动,采用基于ARM7和运动控制芯片的控制器。三是中央控制器,主要是汇集来自各个传感器的数据(例如,温度、湿度等),并将搜救装置的状态信息反馈给操作者,并接受来自操作端得数探测装置的控制器采用基于ARM9的嵌入式控制器
用户交互装置由一台PC机构成,通过无线网络与搜救装置进行连接。在PC机上运行总控界面,还安装有三维鼠标,通过它可以直接操作机器手完成相应的动作。机械手的状态可通过图形仿真来予以显示。
