城市地下综合管廊盾构长大坡度防溜车应急措施
(中铁隧道集团三处有限公司,广东省广州市,523000)
【摘要】在隧道工程施工中,盾构法是一种比较重要的施工工法,但是由于地下环境复杂多变,不可预知的风险因素多,尤其是盾构施工大纵坡水平运输,如果风险控制措施落实不到位,极易发生电瓶车溜车事故,造成极为严重的人员伤亡和经济损失。本文主要以广州市城市地下综合管廊建设项目为例,对盾构法施工中大纵坡的水平运输安全风险进行讨论和分析,并对风险控制的技术措施和管理措施作出合理建议和防范措施,为相似工程施工提供参考和借鉴,以提高大纵坡水平运输安全性与可靠性。
【关键词】盾构施工 大纵坡 水平运输 安全风险 控制措施
前言
广州市中心城区综合管廊(沿十一号线)工程,与广州地铁十一号线同期施工,主线42.6km,科韵路试点段3.1km,全线共设工作井44 座,控制中心1座,平均井间距1.04km,区间为5.4米内径圆形断面,全部采用地下敷设方式进行建设,项目建成后将为电力、通信、给水等管线提供入廊条件。为避让广州地铁十一号线,既有地铁运营线、既有城市桥梁、隧道、高压电塔等建构筑物,地下综合管廊项目盾构区间大量采用了小曲线、大纵坡等极限设计,最小曲线半径仅为230m,最大纵坡达42‰,线形设计基本达到盾构施工的极限,设备操作难度较大,水平运输风险较高,如何降低水平运输过程中的安全风险是一个重要的管控过程。
一、管廊水平运输安全施工重要风险源分析
1.1隧道大坡度风险
“大坡度”为管廊隧道的主要特征,亦为盾构水平运输时的重要风险源,机车通过上下坡时,负载变大,轨道与车轮动摩擦力减小,机车易发生失速、打滑、溜车等问题,存在极高安全风险。
1.2隧道小半径风险
机车通过小半径转弯时,过高的运行速度极易造成机车跳轨甚至翻车,且转弯过程中司机的可视区域更小,与轨行区障碍物发生碰撞的风险更高。
1.3 司机误操作风险
机车司机若仅凭借经验操作,经常忽视安全操作标准步骤,在紧急情况下受心理素质影响,司机难以保持冷静,紧急制动思路混乱,存在极高的安全风险。
1.4轨行区交叉作业风险
盾构水平运输过程难免与轨行区清理、隧道堵漏、管片修补等工作交叉作业,不进行有效的安全管控极易造成人员伤害。
1.5设备可靠性风险
设备的可靠性亦为重要风险源,设备及轨道缺少日常的安全维保、检查、评估工作,在机车运行过程中关键部件(空压机、刹车、动力源)失效,结合其他风险并发,易造成安全事故。
二、管廊水平运输安全施工重要风险源目前针对性措施
2.1机车大坡度防溜车措施
1、控制车速,机车在常规行驶时车速应不超过4.8km/h,过大坡度时速度控制在2.4km/h以内,小曲线转弯时速控制在制在1m/h以内
2、每日在大坡度路段轨道撒沙,以增大摩擦力,达到良好的制动效果;
3、定期进行机车大坡度重载测试,根据制动时间及时进行调整设备状态,确保大坡度的有效性;
4、水平运输区间,每隔一段距离设置应急沙袋和阻轨器
5、加强司机技术安全培养,详见4.3内容;
6、加强机车维保工作,详见4.5内容。
2.2机车过小半径路段安全措施
1、增大轨枕铺设密度(800m-1000m间隔铺设一块),同时使用螺纹钢将轨枕与管片螺栓、轨枕之前焊接固定形成整体,增加钢轨的稳定,减小钢轨外翻;
2、增大轨道拉杆密度(5-8米设置一根),降低因长时间偏载造成的轨道变形;
3、增强操作人员对该区域的操作规范要求,在机车进入该区域时应提前降低车速、鸣笛警示、提高警惕等;
4、加强轨道巡视与轨道调整,严格控制该区域轨距;
5、加强该区段轨道养护,保证该区域轨面干燥与洁净;
6、轨道连接处缝隙应小于4mm,发现大于4mm缝隙应立即对轨道进行修补;
7、轨道连接处道夹板必须上满,且每班需对轨道螺栓松紧程度进行检查并及时复紧;
8、在隧道内的重点位置增设自动报警提醒设备、标识牌,及时提醒操作人员与隧道内工作人员。
2.3 防司机误操作安全措施
1、机车操作司机必须经过安全技术交底培训考核,经考试合格后方可上岗操作,日常加强司机操作规范培训,针对不同场景进行模拟检测,使司机针对不同场景有明确的操作思路;
2、交班会强调水平运输安全重要性,提高安全意识,防止司机麻痹大意;
3、与司机分享水平运输事故案例,提高司机安全敏感性的同时亦可加深对紧急事件的处理思路,防止司机误操作;
4、调整优化机车操作系统,以限位、开关等机械手段防止司机的误操作(档位限速、防昏睡功能等);
5、机车司机配置对讲机,调至统一、固定、通讯效果良好的频道,利于现场人员对司机误操作的及时提醒,同时利用现场自动报警设备、标识牌等在易发生误操作区域进行提醒,防止安全事故的发生。
6、机车启动后,无论是上坡、下坡或是平道上启动都应遵循以下操作原则:
(1)左手握住机车驻车手柄,右手放在调速柄上。
(2)左手在松开驻车制动手柄的同时,右手将调速手柄旋动到第一个档位上。或者:
(3)右脚踩下脚踏板,右手放在调速柄上。
(4)左手在松开驻车制动手柄,右脚松开脚踏板,同时右手将调速手柄旋动到第一个挡位上,列车开始启动。
(5)机车在运行过程中,如超载使变频器发生保护性断电,应把手柄拨回零档,同时踩下脚踏板,待机车停稳后在重新启动。如变频器频繁发生保护,应停车查清鼓掌并清除后再使用机车。
(6)机车司机不得擅离座位,严禁在机车行驶中或尚未停稳前离开座位。离开座位时,必须切断电动机电源,将控制器手把取下保管好,扳紧车闸,但不得关闭车灯。
7、机车运行时前方有障碍,应鸣喇叭,且减速,如障碍不能及时排除,机车应实施紧急制动。
8、在光照强度不够,视觉模糊的情况下,机车应开警示灯,前后照灯,仪表灯,司机在驾驶机车运行时要时刻注意前后方的情况,以及操纵台上的各种仪表和显示灯。
9机车编组出后配套后,及时关闭溜车防撞梁。
10、机车在所有的弯道处都应该慢行,并且鸣笛,以提醒前方的作业人员。
11、当手柄意外扳断时,迅速把启动钥匙拨回零位,使变频器断电,否则,变频器会一直在档位上,机车不能停住。
12、在实际的运输作业过程中,因为工作需要,可能有临时的摘车(或接车),摘车时要注意如下事项:
(1)摘车前首先机车必须制动;
(2)调车员要在需要脱离的小车前后轮子各放置一个阻轨器,防止小车在脱离后溜车;
(3)调车员跟司机密切配合前后点动电瓶机车,直到能取出连接插销;
(4)接车作业时,跟摘车基本相似,调车员跟司机密切配合前后点动机车,直到能插入连接插销。
13、司机离开机车时,必须将手柄扳到制动位置,控制手柄位于零档位置。
14、机车禁止载人,并在设备检修时,司机没有得到明确指令时禁止一切操作。停机时应切断电源并去掉钥匙开关。
2.4 轨行区交叉作业安全措施
1、制定规章制度,除必须在轨行区进行作业队伍外,其他人员严禁擅自进入轨行区;
2、人员在隧道轨行区作业时,必须在作业区域两侧50米走道板处各安排专职调度人员盯守,该人员应配置口哨、手持信号警示灯、对讲机,待有机车接近时应及时对作业人员与机车司机进行警示;
3、加强轨行区作业人员安全教育,要求作业人员发现机车接近时应立即停止作业,先保证自己到达安全区域,后督促身边同事及时避让,发现轨面存在障碍物时,应先通过调度人员示意电瓶车停车,待机车驻车完毕后方能组织人员对轨面进行清理;
4、加强机车倒车影像的维护,为机车司机倒车提供充足视野;
5、提高司机安全意识,当机车司机发现轨行区有人员活动或收到调度警示信号时,应立即减速或停车,同时鸣笛警示,待人员安全撤离轨行区时方能重新行驶;
6、后配套1号台车上安装防撞梁,避免因停车不到位、不稳或刹车失效导致的溜车事故发生。
2.5设备可靠性安全措施
1、提高设备选型标准,严格对机车的历史运行情况进评估,对存在严重历史设备问题的机车进行筛选过滤;
2、组织维保每班对机车各系统进行维保检查工作,定期组织厂家对机车进行全面检查工作;
3、每班机车启动前应先由司机配合维保人员对机车各系统进行试运行检测;
4、加强机车技术知识培训,组织厂家对维保人员、司机进行专业原理、维保培训,提高自有人员技术能力;
5、加强设备维保管理,利用“手机二维码现场打卡”的方式,考核现场设备管理人员及维保人员,有效督促设备维保、巡查质量;
6、每班安排专人巡轨,及时组织人员对发生变形、松动、破损的轨道进行调整、修复工作。
三、防溜车新增措施(第一阶段)
3.1声光报警设备
3.1.1基础设置(前期)
隧道内每50米设置一处声光报警器(见图3-2-1),在电瓶车通过时隧道内进行声光报警,警示轨行区作业人员及时避让,按照不利车况估算,报警发生时轨行区作业人员有不少于17秒的反映时间进行避让。

图3-2-1 隧道内声光报警安设
3.2轨道阻挡设置
3.2.1基础设置(前期)
1、在洞口设置1-2处止挡装置(防撞墩+止挡杆),当收到电瓶车溜车报警时,由下挂钩人员下放止档杆进行阻挡减速(见图3-2-2);

图3-2-2 止挡墩设计图样
2、在轨道两边布设减速沙袋,当溜车警报发生时,由下挂钩或隧道工在轨面进行沙袋堆放;
3、在出洞方向轨道末端提前堆放沙袋作为止挡(见图3-2-3),盾构机车架位置则以防撞梁作为止挡。

图3-2-3 末端防撞沙袋及防撞墩(现场图)
四、防溜车后期完备措施(第二阶段)
电瓶车安装一个控制主机系统并带10寸显示屏:
1、接红外测速模块,测车车辆的车速;
2、接电瓶车控变频器或开关控制,
3、接RFID读卡器读取隧道沿途的RFID卡,识别车辆在隧道中的位置;
4、接车头车尾的感应器,感应隧道两端的停卡位;自动制动停车;
5、接车头车尾的防爆摄像头,查看车头车尾的实时视频;
6、接车头车尾的激光传感器,检测车辆正前方的障碍物。
4.1电瓶车测速
电瓶车安装红外测速模块,实时上报车速给电瓶车控制主机。
4.2电瓶车自动制动
电瓶车控制主机通过接收红外测测速模块的速度,如果超过预设速度,即自动控制电瓶车变频器或开关来控制电瓶车的车速或停车。
4.3电瓶车位置定位
电瓶车上安装RFID读卡器,在隧道沿途安装RFID卡片,RFID读卡实时读到沿途的RFID卡,实时了解电瓶车的位置,最终可以实现在隧道中的平面或3D图中显示电瓶车的实时位置。
4.4电瓶车的起终点自动停车及坡度位置自动限速
电瓶车上的车头车尾位置安装接触式感应器,在隧道的起点或终点安装对应的感应位置,当电瓶车到达起终点位置,自动停车。在沿途中有坡度的位置自动检测车速及控制电瓶车变频器限制控制车速。
4.5电瓶车的车头车尾视频查看
电瓶车上的控制主机通过网络接入车头摄像头,通过无线方式接入车尾摄像头,实现实时查看车头车尾的实时视频。
4.6电瓶车的车头障碍物检测
电瓶车上的控制主机通过有线接入激光雷达检测障碍物,通过无线方式接入车尾激光雷达,实现车头车尾有障碍物自动停车。
4.8防溜车装置开启及喇吧
安装在隧道的防溜车装置;当电瓶车控制主机通过检测车速,发现车辆过快时,通过无线信号发信号启动防溜车装置的开关;及喇吧广播通知。
4.9电瓶车轨道紧急抱死装置
设计改造电瓶车,在紧急情况下,启动轨道抱死装置使电瓶车紧紧夹住轨道,进行紧急制动。
4.10信息互联互通
作业区域网络全覆盖,实现监控室、盾构操作室、机车司机室的信息传递互联互通,提高水平运输与盾构掘进的工序衔接效率与联动性,增强管理指令的落实力度。
4.11管理制度落实、跟踪的信息化
作业区域网络全覆盖,利用水平运输电瓶车安全监测信息化平台(尚未搭设),对机车行进、操作、维保、巡查状态进行全方位监控,兼容web端与移动设备,在线实现动态监控、全员管理、一键警示等功能。
4.12轨道电动平台安全监管平面图初步设想
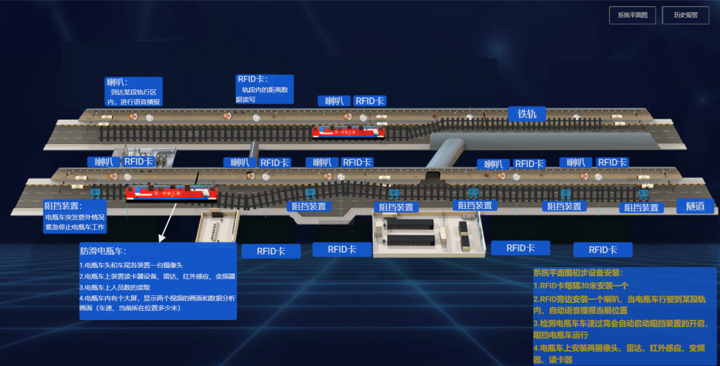
图4-1-1 安全监管初步设想图
五、后续施工设想及展望
当前智能机器人、人工智能、大数据、超级计算机等技术方兴未艾,依托于科技的进步,施工工序相对单一的盾构施工将逐渐进入无人化的时代。盾构管片拼装可随着盾尾间隙测量系统的逐渐成熟逐步实现管片自动选型、自动拼装工作;电瓶车、门吊等操作亦可随着信息技术、传感技术的进步逐渐实现无人操作;盾构机的自动驾驶主要受限于地质环境的复杂性,但随着盾构掘进参数等相关信息的收集,利用大数据及人工智能最终亦可实现无人驾驶。
六、防溜车措施现场落实成果
1、在后视系统安装的前提下,增加前视及操作室两个监控界面,不仅增加了司机的视野角度,对司机的实时操作也可以进行全方位的监控。
2、施工过程中,定期对水平运输轨道进行巡视、水平间距、垂直度进行复测,及时对运输轨道调整、加固。
3、洞口位置安装限高、限宽门,安装警示灯带;于轨道端头位置设置车挡,堆放沙袋,并安装警示灯带,安全标语。
参考文献:
[1]计春伟.城市交通中地铁的安全风险与防范[J].区域治理,2019(52):183-185.
