驱转一体式主动万向轮设计与实现
摘要:为了实现提高有限空间内轮式移动机器人运动的速度、加速度和承载能力上限,提出一种驱转一体式主动万向轮模块,介绍了该主动全向轮模块的原理、结构和参数的设计过程,并将该模块运用在四轮驱转一体机器人上,结果表明能够达到较大的速度和加速度,承载能力强。
关键字:移动机器人;全向轮;驱转一体式;模块化;全向移动
中图分类号:TP242 文献标识码:A
Design of active universal wheel for mobile robot
TANG Fei-long LI An-qing ZHANG Na
(School of Automotive and Electronic Engineering, Xichang university, Xichang 615000, china)
Abstract: In order to achieve the increase of the limit of the wheeled mobile robot, in terms of speed, acceleration and load capacity, We have proposed a drive-and-turn integrated active universal wheel module, The design process of the principle, structure and parameters of the active omnidirectional wheel module is introduced, And have applied this module to the four-wheel drive integrated robot. The results show that it can reach larger speeds and accelerations, and has a strong carrying capacity.
Keywords: mobile robot; omnidirectional wheel; Integrated drive and rotation; modular
0 前言
轮式移动机器人作为机器人大家庭里的重要分子,随着社会的发展,在自动化进程中占据着重要地位,为了让轮式移动机器人能够在室内狭小的工作空间内作业,更强的机动性和灵活性是必要的,所以需要机器人在平面内具有三个自由度[1, 2]。
为了达到上述目的,常常采用Mecanum轮系,Mecanum轮的结构是大轮的轮缘上沿周向均布小轮子,小轮子作为轮系薄弱部分,限制了轮系的承载能力上限[3];其工作方式是将速度分解,一部分相互抵消,一部分形成运动方向的合速度,所以运动时机构效率不高,速度上限低[4]。
近些年来四轮独立驱动、独立转向的移动机器人频繁亮相,部分豪车也采用了四轮独立驱动、独立转向,本文采用模块化设计思想,设计并搭建驱转一体式主动万向轮模块[5-7]。
1 驱转一体轮方案设计
所要设计的驱转一体轮需要两个独立的自由度,即具有轮子绕轴旋转的运动和轮子在垂直方向上相对于底盘的转向运动,基本思路是:通过2个相互独立的电机分别给这2个方向的运动自由度提供动力,在运动时只需对2个电机进行控制就可以实现对驱转一体轮两个运动自由度的控制[8-11];两个独立电机,用于驱动轮子转向的电机称之为转向电机,用于驱动轮子绕轴转动的电机称之为驱动电机;根据上述思路,对于转向部分,方案1:转向电机与蜗杆固定连接,与蜗杆啮合的涡轮通过转盘固定在底座上,涡轮和底座上开有长条孔供轮子一部分穿过涡轮和底盘与地面接触,此方案特点传动比大,转向速度慢,有反向自锁作用,涡轮加工困难;方案2:转向电机与小齿轮固定连接,与小齿轮固定连接的大齿轮通过转盘固定在底座上,此方案转向快可以快速完成姿态调整,但是反向无自锁,需要电机保持力矩,大齿轮加工容易;对于驱动部分,方案1:驱动电机通过联轴器与驱动轴连接,此方案特点是结构简单同轴性好,但是驱动轴轴向结构臃肿占空间,转动惯量大,转向电机负载也会增加;方案2驱动电机竖直方向布置,电机轴通过联轴器和一个锥齿轮连接,参与啮合另一个锥齿轮于轮子驱动轴连接,此方案特点是轴向结构紧凑,等效到转向电机轴上转动惯量小。结合上述分析,本文设计的驱转一体式主动万向轮包括转向电机、驱动电机、联轴器、锥齿轮一对、圆柱齿轮一对、转盘、轮子和轴承若干,如图1所示。
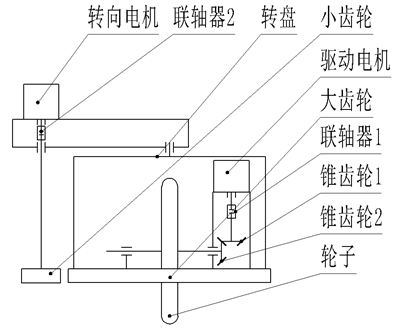
图1 驱转一体式主动万向轮传动系统图
联轴器2为刚性联轴器,如果空间不足,可以采用电机轴直接与小齿轮连接,联轴器1为柔性联轴器,可以在重载和大加速度时可以保护驱动电机、锥齿轮1和锥齿轮2,大齿轮和底盘之间通过转盘可转动连接,使得大齿轮可以带着轮系相对于底盘旋转,转向电机驱动小齿轮,小齿轮和大齿轮啮合驱动大齿轮相对于底盘旋转,大齿轮和转盘中间均有圆孔,轮子的一部分穿过圆孔与地面接触。
2 驱转一体轮的运动学分析
驱转一体轮的运动学分析是为了得到输入(转向电机和驱动电机)与输出(轮子转角和轮子滚动)的关系,根据驱转一体式主动万向轮的内部原理,全向轮的转向角度θ与大齿轮和小齿轮的传动比有关,传动比λ等于从动轮齿数z2与主动轮齿数z1之比,一般齿轮啮合都选用模数m和压力角a都相等,所以传动比λ也等于从动轮分度直径d2和主动轮分度圆直径d1的比值,所以全向轮的转向角度θ与转向电机的旋转角度δ的关系如式(1)所示:
(1)
在参数设计时,可以通过合理分配传动比来在一定程度上调整转向精度,如果需要还可以采用其他大传动比的传动机构,或者采用多级减速。
运动时,驱动电机转速n1与轮子的转速n2成比例关系,比例与电机到轮子的总传动比λn有关,包括减速级总传动比λ1和锥齿轮的传动比λ2。驱动电机转速n1与轮子的转速n2得关系如式(2)所示:
(2)
根据式(1),全向轮转向角度与转向电机的转向角度成比例关系,比例与设计时传动比有关,根据式(2),轮子转速和角位移也可以通过固定比例求出需要驱动电机转速和角位移,所以该主动全向轮控制简单,数学建模和控制均容易。
3 全向轮的结构和参数设计
3.1驱转一体轮各部分参数设计
对于转向部分,转盘可以是旋转餐桌上转盘与桌面连接件,外径140mm,内径90mm,大齿轮中间开矩形接圆的孔,其中圆直径90mm矩形宽度50mm,由于大齿轮结构特殊、受力小等特点,同时考虑等效转动惯量等问题,采用5mm碳纤板雕刻,大齿轮模数取2,齿数z2取95齿,分度圆直径等于d2等于190mm,大体步骤为CAXA绘制相应二维图,导出DWG文件,雕刻机规划路径后用2.5mm铣刀加工,选用小进给量和加适量润滑油避免断刀。小齿轮有成品铝合金齿轮,选用齿数z1为30,模数m1为2,分度圆直径d1等于60mm,此级传动比λ约为6.33;对于驱动部分,轮毂铝合金材料,为了增大抓地力,轮缘为酚醛树脂材料,轮子周长300mm,为了得到更大转矩,驱动电机为减速电机,通过柔性联轴器与锥齿轮2相连,由于需要大的加速度,锥齿轮1和锥齿轮2模数取2,齿数均取15,齿数比为1,材料为碳钢。
3.2驱转一体轮的结构设计
如图2所示为驱转一体轮的结构模型,固定架固定在底座上,转向电机固定在固定架上,固定架通过CREO三维建模,采用增材制造,塑料丝线材料,填充率设置60%,填充结构蜂窝状,小齿轮与转向电机轴连接,大齿轮和小齿轮啮合,转盘外圈与大齿轮固定连接,转盘外圈与底座固定连接,轮子通过键连接固定在驱动轴上,驱动轴通过轴承座固定在大齿轮上,驱动轴一端连接锥齿轮,锥齿轮箱通过CREO三维建模,采用增材制造,塑料丝线材料,填充率设置80%,填充结构蜂窝状,锥齿轮箱固定在大齿轮上,驱动电机固定在锥齿轮箱上。
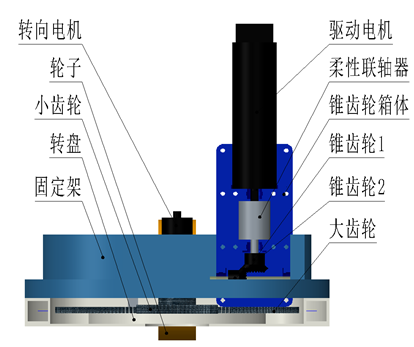
图2 主动万向轮模型
图3所示为驱转一体式主动万向轮,用于四轮机器人平台,该移动机器人平台在相同尺寸和重心高度的情况下,比经典的三Mecanum轮全向移动机器人平台具有更好的稳定性,而且与Mecanum轮分运动驱动平台运动不同,驱转一体轮相互之间没有部分运动相互抵消,所以可以有更高的加速度和运行速度,由于不需要在轮缘上布置小轮子,所以轮子结构更加简单,单个轮子承载能力更强,同时由于多了一个轮,竖直方向总的承载力更强,根据前文分析也可以知道驱转一体轮控制也更加简单。
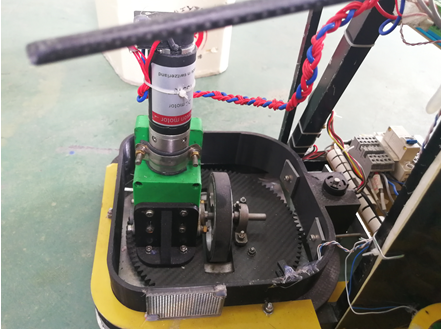
图3 驱转一体主动万向轮实物
4结束语
本文基于模块化设计思想,研究了提高移动机器人全向轮的速度、加速度和承载能力的问题,为了得到更高的性能上限,本文基于通过2个相互独立的电机分别给这2个方向的运动自由度提供动力,在运动时只需对2个电机进行控制就可以实现对驱转一体轮两个运动自由度的控制的思想,采用驱动电机驱动轮子转动得到向前运动的动力、转向电机驱动万向轮转向得到方向和位姿的控制,制作了驱动转向一体的全向轮,该全向轮机构模块可以在4轮全转向全驱的轮式机器人上采用,组成通用机器人底盘,为室内移动机器人全向轮提供高速度、加速度上限和较高承载能力的解决方案。
参考文献
[1] 王一治,常德功. Mecanum四轮全方位系统的运动性能分析及结构形式优选[J]. 机械工程学报. 2009, 45(05): 307-310.
[2] 莫然,张进,高淑芝. 基于麦克纳姆轮的全向移动自主机器人[J]. 山东工业技术. 2017(08): 233.
[3] 丁永强,丁志强. 一种万向车台驱动轮及运动学的研究[J]. 机械研究与应用. 2017, 30(03): 57-60.
[4] 王兴松. Mecanum轮全方位移动机器人技术及其应用[J]. 机械制造与自动化. 2014, 43(03): 1-6.
[5] 郑圣子. 模块化四轮全向驱动小车设计与运动控制方法[J]. 天津科技大学学报. 2013, 28(05): 61-65.
[6] 滕鑫淼,李昆瑜,曾琼. 四轮驱动全向底盘的控制方法研究[J]. 计算机测量与控制. 2015, 23(05): 1549-1552.
[7] 石世杰,丁慧. 四轮全向移动机器人的运动控制分析[J]. 科技展望. 2016, 26(04): 145.
[8] Pinfg, Killoughsm. A new family of omnidirectional and holonomic wheeled platforms for mobile robots[J]. IEEE Transactions on Robotics and Automation. 1994, 10(4): 480-489.
[9] Yibj, Kimwk. The kinematics for redundantly actuated omnidirectional mobile robots[J]. Journal of Robotic Systems. 2002, 19(6): 255-267.
[10] Muirpf, Newmancp. Kinematic modeling of wheeled mobile robots[J]. Journal of Robotic Systems. 1987, 4(2): 281-340.
[11] Agulloj, Cardonas, Vivancosj. Kinematics of vehicles with directional sliding wheels[J]. Mechanism AND MACHINE THEORY. 1987, 22(4): 295-301.
