Step函数在UG运动仿真中的具体运用
摘 要:科技的发展和时代的进步,为我国各领域的创新和改革带来了重大机遇,计算机仿真技术作为当前信息化发展的产物,应用到航空航天等领域中更是取得了巨大成果,特别是在研发过程中,计算机仿真技术中的step函数更是充分的发挥出自身最大的作用。鉴于此,着重分析研究当前step函数在UG运动仿真中的具体作用,并对此进行实际的分析研究,旨在为我国计算机行业的发展贡献力量。
关键词:step函数 UC仿真运动 具体应用
The Application of Step Function in UG Motion Simulation
LI Lihong
(Jiangsu safety technology Career Academy, Xuzhou 221011)
Abstract: With the development of science and technology and the progress of the times, it has brought great opportunities for the innovation and reform of all fields in our country. As the product of the current information development, computer simulation technology has made great achievements in the application of aerospace and other fields, especially in the process of research and development, computer simulation. The step function in technology is giving full play to its biggest role. In view of this, this paper focuses on the analysis and study of the specific role of the current step function in the UG motion simulation, and has carried out a practical analysis and research in order to contribute to the development of the computer industry in China.
Key words: step function,UC simulation motion,concrete application
计算机仿真技术在实际应用过程中,其动力学仿真主要采用ADAMS软件,但对于一些中小型企业来讲,较专业的动力学软件花费较高,但UG仿真技术却可以有效对机构进行力学动力仿真,从而通过加入驱动控制函数来控制机构的整个运动规律。
1 step函数以及UG的概述
1.1 step函数
在运动仿真中,需要具体结合实际的运动函数转为step函数,并在此基础上控制模型的实际运动时间,以此来有效把控运动规律。因此,step函数作为一种运动函数,其基本表达式为step(x,x0,h0,x1,h1)具体参数如表1所示。
表1 step函数中参数的表达
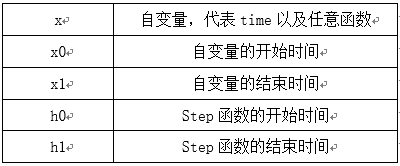
作为一个运动函数,step的函数表达为当x﹤x0,则step的函数值为h0;当x0﹤x﹤x1,那么step函数为:h0+(x-x0/x1-x0)2(h1-h0),当x≥x1时,step的函数值为h1。在进行仿真运动的过程中,step运动函数还需要实际给定的函数转为step函数以后,才能有效控制模型运动时间,其中,运动函数转化后的step运动控制方波函数模型主要如图2所示,其中,纵坐标为速度和位移,横坐标为变量。如图所示,在x0﹤x﹤x1这段中,取微元为0.0001;当x0-0.0001﹤x﹤x0,step(x,x0-0.0001,0,x0,1)=[(x-x0+0.0001)2/0.00012];当x1-0.0001﹤x﹤x1,step(x,x1-0.0001,0,x1,-1)=-[(x-x1+0.0001)2/0.00012],那么,step函数所表示的左边的函数f(x)为:(step(x,x0-0.0001,0,x0,1)+(step(x,x1-0.0001,0,x1,1当x1﹤x﹤x2同上,当x2﹤x﹤x3时,可表示为(step(x,x2-0.0001,0,x2,1)+(step(x,x3-0.0001,0,x3,1)g(x)。因此,整体看来,step整个运动过程的控制函数为(step(x,x0-0.0001,0,x0,1)+step(x,x1-0.0001,0,x1,-1))f(x)+(step(x,x1-0.0001,0,x1,1)+step(x,x2-0.0001,0,x2,-1))g(x)。
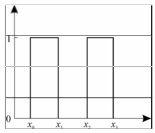
图2 方波函数
1.2 UG
UG(unigraphics NX)作为Siemens PLM software公司出品的一个产品工艺方案,主要可以为用户的产品设计以及相关加工提供一种科技化和数字化的造型与验证手段。该技术可以根据客户的实际需求和期望设计相关虚拟产品,以此满足客户需求。UG作为一个计算机辅助设计和计算机辅助制造系统,凭借着强大的功能和专业的实体在各领域应用中都能展现其自身价值,在诞生之初,UG主要基于工作站,但随着科技的发展和时代的进步,UG在PC端上的应用逐渐拓宽,并逐渐形成了三维设计的主流应用。特别是在CNC加工以及模具设计中更是取得了较理想的应用成果。
2 Step函数在UG中的应用实例分析
2.1 连杆
在这一过程中主要是通过UG建模来创建3个同样大小的长方体,并在长方体各个块的正面进行标注,在标注后,在此基础上画出两条辅助线,进入相关的仿真模块进行分析,还要根据所给出的运动导航器来新建仿真,并选择合适的运动类型,在建立合适的运动仿真后,需要将其分为上下两部分,还要通过两条辅助线直线定义连杆,在此过程中,需要额外输入质量以及相关惯性信息,并填写任意数字,即可完成连杆的建立。
2.2 创建运动副
在创建运动副的过程中,需要将上下两边为矢量来进行分别创建,并在相应模块的辅助线上创立滑动副,但要保证每个连杆都可以有效连接。与此同时,还要编写step函数驱动,并保证三个叠加块可以在最终展开后实现位置交换,并能精准控制实际的移动位置。在这一过程中,首先要促使上块向上移动,还要向左移动,并向下及向右移动。这一过程中的驱动主要为step(time,2,0,3,100)+step(time,8,-100),上快的辅助直线连杆纵向驱动可以为step(time,6,0,7,60)+step(time,8,-60)
2.3 创建电缆副
在创建电缆副的过程中与下块的实际移动方式存在一定的不同,但同样的下块上的辅助直线与上块的辅助直线会连成整个线缆副,当连杆以及电缆副创建完毕后,便可以进行解算,还可以通过动画来控制工具条进行整个过程的模拟。
3 结论
step函数是时代发展和科技进步的产物,同样也是计算机仿真技术成熟的产物,这说明当前的step函数具有更广阔的发展空间和应用空间,特别是在UG创建三维动画仿真中更是可以有效节约成本,并提升整个工作效率。通过UG的step运动函数可以对运动时间进行有效控制,还可以方便设计者加强对运动时间以及运动范围的控制。特别是对装配动画更是可以起到有效控制。这说明step运动函数的逐渐成熟以及技术更具有适用性。作为利用函数编辑动画仿真的基础,对step的熟练使用更需要加强对step技术的认识和掌握,特别是结合当前先进的计算机仿真技术进行处理,这样才能更好地发挥step运动函数的最大作用,并促进计算机行业良性发展。
参考文献
[1]陈正水,邓益民.基于UG的STEP运动仿真函数对运动时间的控制分析[J].宁波大学学报(理工版),2012,(4):103-106.
[2]邢智雄.Step函数在UG运动仿真中的应用[J].重工与起重技术,2017,(2):22-23.
[3]陈炎冬,戴斌宇,冯鲜.基于UG及STEP函数的抓举机工作装置运动仿真和分析[J].装备制造技术,2017,(12):76-78,84.
