光伏电站自动养护机器人的设计与控制
摘要:由于我国的很多地方的太阳能光伏电站坐落在西北干旱地区,自然环境相对恶劣,风沙天气风雪等导致光伏组件表面极易沉积沙尘,这样必然使得光伏电站光电转化效率很低,造成很大的经济损失,光伏电站自动养护机器人可以很好的解决这一问题,所以研制出一款适用于北方干旱地区的太阳能光伏组件的养护机器人,在没有其他的辅助条件下,自动完成光伏组件表面的各类清洁和养护。本文提出了一款适用于这一复杂环境的光伏电站养护的机器人,分析其工作模式和运作与控制,探讨其设计的意义和价值。
关键词:光伏电站;养护;机器人;设计
研制出一款适用于北方干旱地区的太阳能光伏组件的养护机器人,在没有其他的辅助条件下,自动完成光伏组件表面的各类清洁和养护。在西北干旱地区自然环境相对恶劣,风沙天气风雪等导致光伏组件表面极易沉积沙尘,光伏电站自动养护机器人可以很好的解决电站光电转化效率很低造成的经济损失问题,本文在探究和分析光伏组件安装结构后,就如何设计一款具有低功耗自动清洁光伏组件养护机器人和如何更好的控制性能稳定的控制系统进行探讨。
光伏电站沙尘污染比较严重会导致光伏组件发电效率降低,当前的光伏电站养护装置都是针对单块光伏电池板,而且很多需要用水洗除尘的装置,在干早少雨地区不适于推广应用。虽然一些相关的研究采用静电除尘技术来清理光伏电池板表面,但静电感应下最终可能会对电池元件造成一些损坏,也有一些研究采取太阳能电池板自动除尘技术,但这一技术成本太高,根本不适合我国当前的光伏电站。目前,北方地区很多的光伏电站清洁光伏组件多数采取喷水冲洗的洒水车或者是人工擦拭的清洁方式。但是光伏电站的实际规模如果很大的情况下,就必须研制了一种能适用于这一大规模光伏阵列的无水养护机器人,不仅能可靠无死角地完成对整个光伏阵列区域的养护,而且还能避免对光伏阵列的遮挡。
1设计思路
北方干旱地区的太阳能光伏组件的养护机器人在戈壁荒漠地区,不仅要适应干旱缺水的条件,而且要清除沙尘污染,无论是什么天气,也不论是在晚上或阴天,就是在电池板处于不发电的状态时,设计的机器人已然可以对光伏阵列进行无死角全面养护。常规的在电池板发电时,机器人停靠在光伏阵列的一端,不对光伏阵列造成遮挡。机器人还具备在行走过程中自动实现差错检测调节的功能。
2养护机器人结构设计
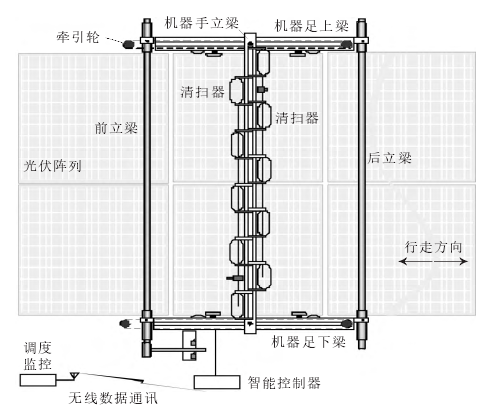
养护机器人的整体结构包括机器足(行走机构)、机器手(养护机构)及避让机构、差错调节机构等(图1)
3养护机器人控制策略
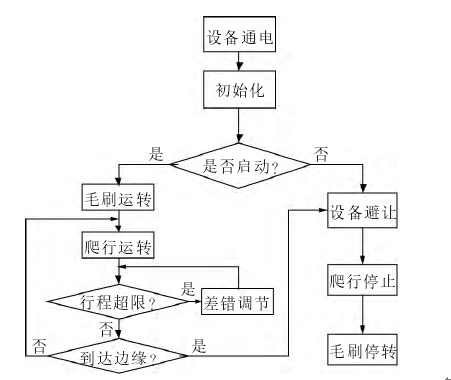
3.1整体运行策略
养护机器人整体运行方式如下图所示
养护机器人的稳定运行,关键在于行走过程中上下机器足的差错调节。光伏阵列养护机器人的差错调节结构主要由上下驱动可调速电机、上下机器足、传动装置及差错调节控制器组成,其中差错调节控制器是整个差错调节系统的核心。
4.2养护机器人的现场运行
本文设计的机器人样机最大纵向跨度3.3m,养护速度1.4m/min,功率350W,抗风强度12级。研制的样机分别在A善某光伏电站、新疆电科院屋顶光伏阵列进行了运行实验,实验中,采用西门子57-200可编程控制器来实现所设计控制策略。
现场运行表明,所研制的养护机器人能够在整个光伏阵列实现自动养护,无卡列现象,养护范围无死角,具有遮光避让功能,养护效果理想;装置可在晚间运行,不影响正常发电。
5结论
本文设计了光伏阵列智能养护机器人,包括在电池板表面行走的机器足、实现养护功能的机器手、防止产生遮挡的避让机构和上下差错检测机构等。该装置在机器足行走过程中能自动实现差错检测控制的功能,停靠位置能够躲避遮挡,可对光伏阵列进行无死角全区域养护。
本文提出了机器人整体运行控制策略,并重点对行走过程中可能出现的上下行走足错
位进行研究,建立了上下行走足的行走模型,设计了调节行走位移差模糊控制调节器。仿真
及现场实验运行结果均表明,设计的模糊控制器合理、实用,养护效果良好。免水养护机器人实现了机器轮行程差智能控制,不会在组件上产生光斑效应,养护效果好,可应用于大规模光伏电站。
参考文献
[1]许军辉.基于ADAMS的柔索驱动并联机器人动力学研究[D].河南工业大学,2014.
[2]胡仁昱.地下管道检测机器人控制技术研究与开发[D].复旦大学,2011.
[3]余世干.登月机器人机械系统设想[DB].https://www.kj009.net/paper/pp705.html,2009.
[4]曾群峰.提速线路精密测量系统有关技术的研究[D].中南大学,2009.
[5]夏添.SCARA机器人的结构设计与运动控制算法研究[D].湖北工业大学,2016.
