以乐高EV3机器人为载体的问题解决式教学模式实践研究——以《机器人冰球》一课为例
(上海市师资培训中心附属闵行实验中学 上海市闵行区 201199)
摘要:机器人教育受到了国内外教育界越来越多的重视,对于基础教育领域而言,竞赛模式或兴趣小组模式依然占据绝对的主导地位,普及性的机器人教育亟待发展。本研究提出的初中机器人问题解决式教学模式的教学流程,它包含“创设情境、激趣引入、新课讲授、构建新知,突破难点、进阶提升,总结归纳、提高升华”四个过程。课堂中合理运用探究方式,实现目标性、导向性和定向性的探究以及交织性、混合性和互动性探究。机器人课程不只是教会学生怎么解决一个具体的问题,也不仅仅是教会学生怎么搭建机器人、操作编程软件,更重要的是学生对于问题解决的一般方法的理解和掌握,并较深刻的认识和领悟。
关键词:乐高EV3 问题解决式 教学模式 课程设计
乐高 EV3 机器人是乐高公司研发小组设计的第三代机器人产品。乐高机器人是最早打开中国市场的一批机器人产品,在2010年,教育部创建了技术教育创新人才培养示范基地,我校是全国示范基地校之一。我校机器人社团课程起步与2002年,大部分学生科技创意作品选用乐高第一代RCX系列制作;2011年学校引进了乐高EV3机器人作为课堂学习的教学用具,以乐高EV3机器人为载体的《我们的Robot—走进机器人世界》校本教材由上海科技教育出版社正式出版。2012年起,六年级学生每周一节机器人课属于必修课。学生通过“玩”乐高EV3 机器人,使得学校对于培养学生的素质教育更进了一步。
机器人教育受到了国内外教育界越来越多的重视,对于基础教育领域而言,竞赛模式或兴趣小组模式依然占据绝对的主导地位,普及性的机器人教育有待发展。我们尝试了问题解决式教学模式,发现有良好的实践效果。在2022年北京冬奥会成功举办的背景下,结合学校机器人课程进行重新整合,设计了《机器人冰壶》、《机器人冰球》、《机器人高山滑雪》和《机器人短道速滑》系列课程,我就结合《机器人冰球》一课来阐释问题解决式教学模式的具体操作过程。
一、初中机器人问题解决式教学模式的教学流程
图1即本研究提出的初中机器人问题解决式教学模式的教学流程,该教学设计框架是在相关理论支撑下进行设计,并经过几轮实践经验的修改而完成的,它包含了“创设情境、激趣引入,新课讲授、构建新知,突破难点、进阶提升,总结归纳、提高升华”四个过程。“创设情境、激趣引入”这个环节,通常使用的方法为基于生活情境的引入;基于问题对比的引入一般是在同一个主题内容的第二节课应用,多用于引入更深入、更复杂的问题解决。“新课讲授、构建新知”和“突破难点、进阶提升”是两个连续的问题解决的过程,它既可以是一个大问题的进阶的不同阶段,也可以是两个独立的但存在前后进阶关系的小问题的解决,但无论是哪种情况,都遵循着问题解决的一般过程:明确问题—分析问题—解决问题—展示点评。其中,对于本研究中的机器人课程而言,分析问题主要是指学生利用自然语言描述问题解决的过程和思路,解决问题主要是指根据自然语言描述并编程调试与实践探索。“总结归纳、提高升华”主要是一般性方法的归纳、问题解决经验的总结以及提出更进一步的问题。
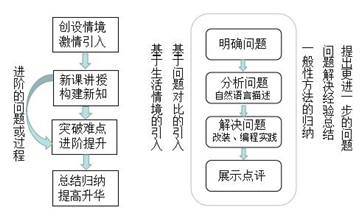
图1 初中机器人问题解决式教学模式的教学流程
二、《机器人冰球》—课的具体实施
我校在六年级开设普及性的机器人校本课程已有接近十年的时间,过程中充分利用学校现有的机器人创新实验室(上海市首批创新实验室)以及EV3机器人相关的硬件设施,现以《机器人冰球》一课为例进行分析说明,主要解决冰球快速破门的方法。
1.创设情境、激趣引入
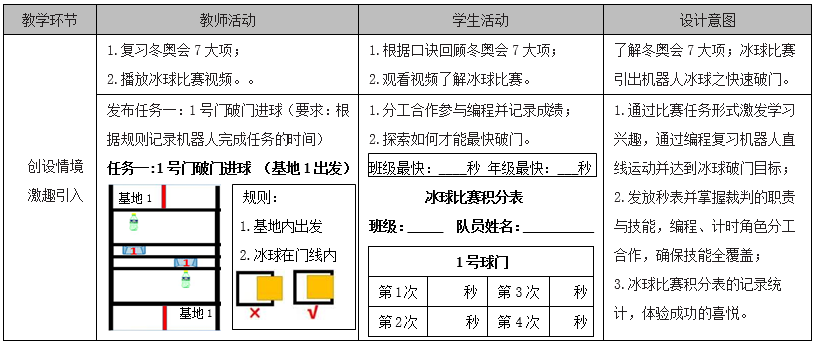
冬奥知识普及。冬奥会分七个大项:冰壶、冰球、雪车、雪橇、滑冰、滑雪和冬季两项,口诀为“两冰、两雪、两滑和一冬”便于学生记忆。教师播放冰球比赛视频,引出本课主题《机器人冰球》中重要环节:快速破门。本环节主要分为两部分,前一部分为复习巩固,主要是上节课学习的基于双电动机驱动的直行与后退程序结构。借助任务一复习上节课内容,要求小组成员熟读规则并明确分工,确保每位学生体验各种角色(1号角色编程,2号角色计时,下一项任务角色交换)如表1所示。
表1:创设情境、激趣引入
任务一探究方式属于目标性、导向性和定向性的探究。教师在学生探究开始前为了某种新的教学目标而做服务于目标的内容或者范畴的设定与指定,但对学生探究的结果并不会很明显或很明确地给出要求,至少不会有“标准答案”。探究结束时可以在教师的组织下进行各自的结果交流,交流后教师可以对学生的多种结果作一定的导向性界定、评价和指正。
小组A结论:直线运动在编程时电机速度调到最大100就能实现最快进球。各组同意A组想法并将速度调到100后互相比赛。教师组织角色1为操控手,角色2观察如何才能更快破门?教师统一发令,组织多次统一比赛后,学生说:“为什么机器人速度调到100后还是出现了快慢”。通过仔细观察后互相交流并总结出快速破门的要素如表2所示。
表2:探究如何快速破门
影响冰球快速破门的要素有哪些? 如何操作准确应对?
1.程序中电机速度 1.电机速度调至最大100
2.操作员听到发令后的反应速度 2.集中注意力且手指头放在触发键
3.出发位置离球门越近越好 3.机器人边缘贴线(俯视不出界)
4.比赛场地平整 4.赛前清洁场地
5.车轮大小 5.选择适合车身且尽可能大的车轮
2.新课讲授、构建新知
本节课的重点在于利用程序中的转弯图标实现机器人的左转与右转并能在实践中灵活应用,教师通过编程演示机器人的左前转、右前转、左后转和右后转,通过演示学生可以直观的看到机器人根据程序灵活转动。程序见图2。

图2机器人转弯程序
3.突破难点、进阶提升
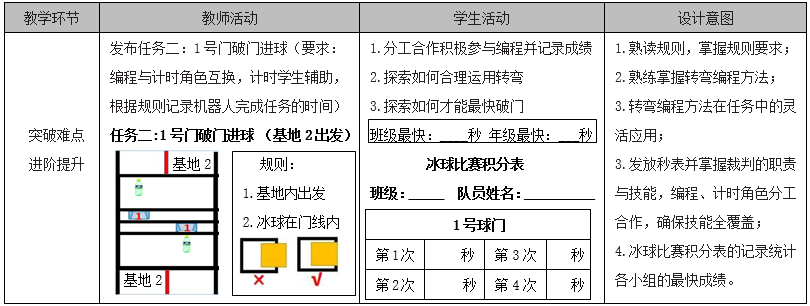
本部分任务设计的目的是让学生学会机器人转弯的编程并在任务实践中灵活应用。任务二的设计主要在任务一的基础上调整了出发位置,促使学生需要运用转弯的程序图标进行设计才能实现冰球在1号球门破门。设计思路和要求在任务一的铺垫下变得更加容易理解。教学中要求角色互换实现全员参与并小组合作完成,这种学习方式能够最大程度地提高学生的课堂参与度,发挥学生的主体性。本任务难度中等偏下,确保学生们能够实现机器人推动冰球破门,能让学生在探究过程中体验到成功的喜悦。任务二的教学环节及各环节的学生活动、教师活动如表3所示。
表3:基地2出发探究如何快速破门
任务二的探究属于交织性、混合性和互动性探究。这种类型的探究主要是教师会较为明确地给出探究的准确目的(但也不一定只有一个答案)和结果要求,然后容许学生朝着确定的目标进行开放式的探究。当然,过程中间可能因为互动性的考虑,教师会在探究的某个进程位置再给定向性探究的一个范例(学生在实验中每一次自我性尝试都可能并不合乎标准,但却是富有意义的,会引发特别的关注和思考)予一定的指向或者要求,体现出学生与教师的一定的交互性,不过仍旧在大多数时候放任学生自由进行。实际上,这种探究较多出现于教师在过程中发现学生偏向很大或者难以找到正确的探究方向时,此时教师适时介人作一些适度的修正或者提醒,然后使其探究可以保证较好地朝向开始设定的准确目标。可以认为,这种探究是一种“保证终极目标的探宄”,或者叫作“结果性一致但路径性不同的探究”。
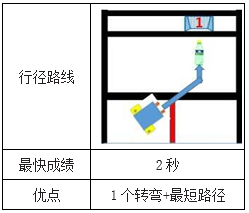
学生在任务一的基础上明确了如何提高机器人速度,实践过程中很明显每个小组的策略是不一样的,由于任务的难度不是很高,学生们都能完成任务二,在课堂上也感受到了破门的喜悦,教师组织各小组登台分享自己的实践策略并共同分析。可以发现各小组机器人的行径路线有很大的不同,学生们也分析了每条路线的优势,如表4所示。
表4:基地2出发机器人行径路径优势分析
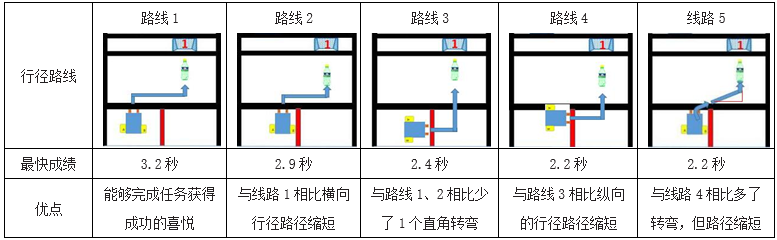
学生们听了各组的分享交流后发现:
①机器人居然能够横着出发?②线路4与线路5的完成任务的时间一样?
教师组织学生再一次熟读规则,根据规则了解到机器人从基地内出发,机器人横向摆放也在基地内,完全符合要求。教师提问:为什么线路5转了两次弯但是最后的成绩与线路4一样?
学生积极思考并交流:
1.线路4比线路5少转1次弯;2.线路4与线路5的转弯的角度都是90°;3.线路5的横向的行径路线正好是直角三角形的斜边,线路4的行径路线是直角三角形的两条直角边,根据三角形定律“三角形两边之和大于第三边”得出:线路5的行径路径比线路4的行径路径短。
学生们掌握了规则的奥秘后,得出机器人的出发的位置是很重要的策略;了解线路5的优势(路径最短)并提出了更优化的实践方案,如表5所示。
表5:优化方案
4.总结归纳、提高升华
教师带领学生总结本课内容并提炼升华,形成问题解决的具体方法与步骤。提出思考:机器人提高速度还可以通过齿轮变速实现,速度非常快又会出现哪些问题?
机器人课程不只是教会学生怎么解决一个具体的问题,也不仅仅是教会学生怎么搭建机器人、操作编程软件,更重要的是学生对于问题解决的一般方法的理解和掌握,并较深刻的认识和领悟。
三、总结及建议
现阶段,虽然机器人教育已经越来越多地深入中小学课堂,但大多以竞赛及社团形式开展,而对于普及性的大班上课的开展形式,实践经验较少。机器人常规课程的开设要综合考虑课程设置、内容设计、软硬件支持、师资配备等多个方面,尤其是课程内容及形式的设计关系着课程开展是否顺利及学生学习是否高效。综上所述,我校开展的机器人校本课程特色体现在以下两个方面。
1.内容设计巧妙,螺旋式进阶提高机器人课程的问题及任务多来源于现实生活,在问题解决过程中,需要学生有较强的逻辑思维及问题解决能力,先分析问题解决方案,后画设计图,最后编程实现。而对于六年级学生来说,逻辑思维能力的培养需要一个循序渐进的过程,这就要求在课程内容设计时做到由浅入深、螺旋式进阶。
2.软硬件支持好,学生通过电脑实现电子书的浏览阅读以及乐高编程软件的编程,稳定的系统环境和极快的响应速度给学生带来了良好的学习体验。乐高ev3套件作为经典的机器人套件,为学生提供了多样化的机器人实现方式,尤其是各种传感器的应用,大大扩展了机器人的功能。
机器人教育的普及为学生综合能力的提升提供了新的可能,但处在初级阶段的机器人普及教育,仍然有很长一段路要走,课程整体设计、软硬件支持、师资配备等问题是当下迫切关注和解决的问题。
